Влияние перекрестных связей в системе асинхронного электропривода с модальным управлением
Конференция: XXXVIII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Электротехника

XXXVIII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»

Влияние перекрестных связей в системе асинхронного электропривода с модальным управлением
INFLUENCE OF CROSS-LINKS IN THE SYSTEM OF ASYNCHRONOUS ELECTRIC DRIVE WITH MODAL CONTROL
Pyotr Chertykov
Undergraduate Siberian Federal University, Russia, Krasnoyarsk
Alexander Pakhomov
Candidate of Science, associate Professor, Siberian Federal University, Russia, Krasnoyarsk
Аннотация. Объектом исследования в статье является замкнутая система асинхронного электропривода с модальным управлением. Предмет исследования – анализ влияния перекрестных связей в модели асинхронного электропривода на характер переходных процессов.
Abstract. The object of research in the article is a closed system of asynchronous electric drive with modal control. The subject of research is the analysis of the influence of cross-links in the asynchronous electric drive model on the nature of transients.
Ключевые слова: модальное управление; блок компенсации; переходный процесс.
Keywords: modal control; the compensation unit; the process of transition.
В настоящее время достаточно часто уделяется внимание разработке и исследованию систем асинхронного электропривода с модальным управлением [1-3], позволяющих обеспечить более высокое быстродействие и робастность замкнутых систем электропривода по сравнению с подчиненным регулированием координат [4]. В большинстве случаев при синтезе регуляторов используется готовое математическое описание объекта управления, в состав которого входит асинхронный двигатель (АД), при этом для упрощения расчетов часто не учитывается наличие внутренних перекрестных связей в модели АД. Основной задачей настоящей статьи является демонстрация влияния перекрестных связей модели АД на качество переходных процессов в случае их пренебрежения при синтезе регулятора и применения блока компенсации.
В качестве объекта управления принята система преобразователь частоты с автономным инвертором напряжения – асинхронный двигатель. На структурной схеме (рисунок 1), блок М является математической моделью АД в декартовой системе координат ![]() , вращающейся с произвольной скоростью
, вращающейся с произвольной скоростью ![]() , уравнения которой представлены в [1].
, уравнения которой представлены в [1].
На структурной схеме приняты следующие обозначения: М – модель АД (АД RA280M2 с номинальными данными: ![]() кВт,
кВт, ![]() об/мин);
об/мин); ![]() и
и ![]() – задание на потокосцепление и скорость ротора АД;
– задание на потокосцепление и скорость ротора АД; ![]() – коэффициенты обратных связей модального регулятора;
– коэффициенты обратных связей модального регулятора;![]() и
и ![]() – коэффициенты усиления, обеспечивающие требуемые потокосцепление и скорость ротора АД при наличии обратных связей; МКР – модель электромагнитного контура ротора АД; kП – коэффициент передачи преобразователя частоты [3].
– коэффициенты усиления, обеспечивающие требуемые потокосцепление и скорость ротора АД при наличии обратных связей; МКР – модель электромагнитного контура ротора АД; kП – коэффициент передачи преобразователя частоты [3].

Рисунок 1. Структурная схема системы без блока компенсации
МКР описывается следующими уравнениями:

где p – оператор Лапласа; ![]() – модуль вектора потокосцепления ротора;
– модуль вектора потокосцепления ротора; ![]() –амплитудное значение взаимной индуктивности обмоток статора и ротора;
–амплитудное значение взаимной индуктивности обмоток статора и ротора; ![]() – электромагнитная постоянная времени цепи ротора АД;
– электромагнитная постоянная времени цепи ротора АД; ![]() и
и![]() – проекции на оси u и
– проекции на оси u и ![]() декартовой системы координат результирующего вектора тока статора
декартовой системы координат результирующего вектора тока статора ![]() .
.
Синтез модального регулятора производится отдельно для двух каналов регулирования: канал регулирования потокосцепления ротора АД с настройкой на модульный оптимум и канал регулирования скорости АД с настройкой на биномиальное распределение корней характеристического полинома замкнутой системы. Процедура синтеза модального регулятора подробно описана в [1].
Для реализации компенсации влияния внутренних перекрестных связей модели АД в структурную схему необходимо добавить блок компенсации (БК), реализуемый по уравнениям:

где ![]() и
и ![]() – сигналы задания напряжения с системы управления;
– сигналы задания напряжения с системы управления; ![]() – скорость вращения вектора потокосцепления ротора АД;
– скорость вращения вектора потокосцепления ротора АД; ![]() и
и ![]() – сигналы задания напряжения преобразователя;
– сигналы задания напряжения преобразователя;![]() и
и ![]() –эквивалентное сопротивление и эквивалентная электромагнитная постоянная времени цепи статора;
–эквивалентное сопротивление и эквивалентная электромагнитная постоянная времени цепи статора; ![]() и
и![]() – проекции вектора тока статора
– проекции вектора тока статора ![]() на оси u и
на оси u и ![]() декартовой системы координат.
декартовой системы координат.
Структурная схема БК приведена на рисунке 2. БК устанавливается в прямой тракт системы электропривода. Моделирование переходных процессов в замкнутой системе асинхронного электропривода с модальным управлением осуществляется в программе Matlab Simulink.

Рисунок 2. Структурная схема блока компенсации перекрестных связей
Переходные процессы угловой скорости вращения вала двигателя и модуля потокосцепления ротора приведены на рисунках 3, 4.

Рисунок 3. Переходные процессы угловой скорости АД (![]() – скорость без БК;
– скорость без БК; ![]() – скорость с БК)
– скорость с БК)
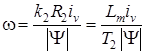
Рисунок 4. Переходные процессы модуля потокосцепления ротора АД (![]() – потокосцепление без БК;
– потокосцепление без БК; ![]() – потокосцепление с БК)
– потокосцепление с БК)
В начальный момент времени ![]() подается сигнал задание на потокосцепление ротора АД
подается сигнал задание на потокосцепление ротора АД ![]() . После того как потокосцепление ротора АД достигнет заданного установившегося значения (работа канала регулирования потокосцепления), в момент времени
. После того как потокосцепление ротора АД достигнет заданного установившегося значения (работа канала регулирования потокосцепления), в момент времени ![]() производится скачкообразное изменение задания на скорость
производится скачкообразное изменение задания на скорость![]() и включается в работу второй канал регулирования.
и включается в работу второй канал регулирования.
Как видно из графиков при отсутствии БК характер переходных процессов угловой скорости не соответствует заданным настройкам (появляется перерегулирование), кроме того в графике потокосцепления возникает существенное (порядка 60%) отклонение потокосцепления ротора от установившегося значения. Напротив, в системе с БК характер переходных процессов соответствует заданным настройкам обоих каналов, что говорит о необходимости использования в системах управления асинхронным электроприводом компенсации перекрестных связей модели АД.
