Система передачи оптических сигналов с ретрансляцией
Конференция: XXIX Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Радиотехника и связь

XXIX Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»

Система передачи оптических сигналов с ретрансляцией
OPTICAL SIGNALS TRANSMISSION SYSTEM WITH THE RETRANSLATION
Boris Kuzyakov
Candidate of physical-mathematical Science, Russian technological University, Russia, Moscow
Аннотация. Основная задача статьи – оценка возможностей беспроводной ретрансляции сигналов оптического диапазона на основе применения квадрокоптеров. В настоящее время, квадрокоптеры широко применяются в разнообразных сферах науки и техники, включая системы телекоммуникаций. Среди отечественных систем беспроводной оптической связи наиболее приемлемой, для решения поставленной задачи, оказывается система «БОКС». Приведены параметры нескольких грузовых квадрокоптеров (ГКР) с разной грузоподъемностью: 6 кг - 15 кг – 100 кг. Показаны области характеристик наиболее привлекательных для ретрансляторов аккумуляторных батарей, в частности, на базе новых материалов: литий – полимеры. Кроме этого, рассматривается вариант способа определения высоты ГКР, альтернативный системе ГЛОНАСС/GPS . В предложенном варианте, погрешность определения высоты ГКР не превышает 3 м. Проведенный многосторонний анализ показал, что в наше время наиболее эффективным носителем ретранслятора сигналов оптического диапазона является ГКР с комбинированным энергоснабжением.
Abstract. The main objective of the article is the assessment of the capabilities of a wireless relay signals of the optical range through the use of quadcopters. Current quadrocopters are widely used in various fields of science and technology, including telecommunications systems. Among domestic systems of wireless optical communication the most acceptable, for the solution of an objective, there is a system "BOX". The parameters of several cargo quadrocopters (GCR) with different load capacity are given: 6 kg - 15 kg – 100 kg. Areas of characteristics of the most attractive for retranslation of accumulator batteries, in particular, on the basis of new materials are shown: lithium – polymers. In addition, a variant of the method for determining the height of the GCR, an alternative to the GLONASS/GPS system, is considered. In the proposed version, the error in determining the height of the GCR does not exceed 3 m. the Multilateral analysis showed that in our time the most effective carrier of the optical range signal retranslation is the GCR with a combined power supply.
Ключевые слова: оптический диапазон; ретрансляция сигналов; квадрокоптер; грузоподъемность; флуктуации корпуса; аккумулятор; определение высоты; стоимость системы.
Keywords: оptical range; retranslation signals; capacity; quadcopter; fluctuations in the housing; the battery; the determination of the height; the cost of the system.
I. ВВЕДЕНИЕ
В статье рассматриваются возможности реализации линии связи оптического диапазона с ретранслятором сигналов (рис. 1) на базе квадрокоптера. В настоящее время квадрокоптеры широко применяются в разнообразных сферах науки [7, P. 9581] и техники, включая системы телекоммуникаций. В ряде работ, рассматриваются вопросы эффективного применения квадрокоптеров для ретрансляции сигналов радиочастотного диапазона. В этих схемах, источник и приемник сигналов установлены на земле, а приемопередающие модули ретранслятора размещены на корпусе квадрокоптера, такие схемы считают "активным". В оптическом диапазоне кроме такой же схемы, возможна - другая: источник и приемник сигналов установлены на земле, а на квадрокоптере размещены переотражатели - зеркальные или уголковые. Ретрансляторы такого типа [6, Р. 3] называют «пассивными».



а) в) с)
Рисунок 1. Вариант системы передачи (симплекс) оптических сигналов с применением ретрансляции: а) - модуль приемника; в) – оптический ретранслятор на ГРК; с) – модуль передатчика
II. "АКТИВНЫЙ" РЕТРАНСЛЯТОР
В данной статье рассматриваются возможности "активных" ретрансляторов. Для оценки их возможностей (см. рис. 1) были проведены ряд экспериментов с использованием «легких» квадрокоптеров: SYMA X5 SW (SYMA) и DJI Mavic Pro Platinum (MPP). В комплект SYMA X5 SW, входит транслирующая камера HD FPV, которая позволяет видеть передаваемое изображение видеокамеры на экране пульта управления или на подключенном смартфоне. Это единственный дрон из серии SYMAX5 с функцией First Person View, передающий видео, через Wi-Fi на частоте 5,8 ГГц. Размер, с защитой пропеллеров – 310 х 310 х 105 мм, общий вес - 120 г. МРР обладает 4-мя винтами, размер - 55 х 52,7 х 19,5 см, вес- 670 г. Этот квадрокоптер имеет современный помехоустойчивый передатчик 2,4 ГГц, который помимо привычных функций по управлению полетом модели позволяет осуществлять переключение различных режимов полета. Дальность действия управления – 100 м. Для «активной» системы, при реализации полной системы «дуплекс», нужны два передающих модуля и два приемных модуля на земле и столько же на коптере. При решении задачи, например, передачи оптических сигналов между авто большой колонны, можно использовать систему «симплекс», всего 4 модуля. Среди отечественных эффективных атмосферных оптических линий связи (АОЛС), большой популярностью пользуются системы «БОКС». Причем, в системе «БОКС» (рис. 2) модули приемника и передатчика выполнены в виде отдельных блоков, что упрощает решение задачи «симплекс». При этом, на ретрансляторе устанавливают только два модуля «БОКС»: один - приемный, второй – передающий (рис. 3). В оптических системах, приведенных на рис. 1, и рис. 3 важными являются: расходимость лазерного излучения и положение коптера по высоте на данной местности. Это обусловлено самой сущностью [1, с. 23; 3, с. 34] оптической системы, так, диаметры внешних линз, используемых телескопов, составляют 110 мм. Расходимость лазерного излучения обычного источника, без дополнительной оптики, оценивается величиной ~ 50 мрад.

Рисунок 2. Основные модули системы «БОКС»: по краям – передающий и приемный модули, в середине – блок управления
При этом, диаметр пятна лазерной засветки на расстоянии 100 м, оказывается, порядка ~ 150 мм, пятна лазерной засветки на экране, на расстоянии 100 м, оказывается ~ 150 мм, при диаметре излучения на выходном торце лазера ~ 2 мм. Если использовать готовые модули системы «БОКС», без стоек крепления, то суммарный вес модулей (по паспортным данным), без системы питания, составит: 2 х 8 кг = 16 кг.
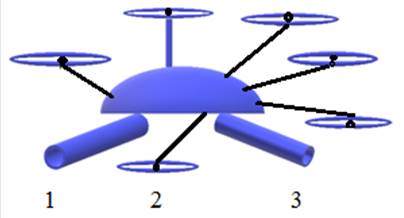
Рисунок 3. Размещение модулей «БОКС» на коптере: 1 – передающий; 3 - приемный 2 – пропеллер коптера
В рассматриваемой системе предполагается использовать грузовой квадрокоптер (ГКР), время его полета, после подзарядки - 15-30 мин. В этой связи, можно ограничиться аккумуляторами относительно небольшой емкости. В этом случае, суммарный вес аппаратуры ретрансляции на коптере, оказывается ~ 20 кг. В наше время, в парке предлагаемых ГКР, имеются модели с требуемыми параметрами, часть из них приведена в табл. 1
Таблица 1.
Параметры моделей ГРП
|
Пп. |
Модель |
Максим. груз, кг |
Стоимость* |
|
1 |
MATRICE 600 PRO |
6 |
300 т.р. |
|
2 |
SteadDroneQU4DX |
8 |
460 т.р. |
|
3 |
Freefly ALTA 8 |
12,5 |
700 т.р. |
|
4 |
Versadrones Heavy |
12,5 |
800 т.р. |
|
5 |
Airborg H8 10K |
15 |
1400 т.р. |
|
6 |
Aerones drone |
100 |
≥ 5000 т.р. |
Данные, приведенные в табл.1, показывают, что стоимость ГКР, существенно выше, чем «легких» коптеров и в сильной мере зависит от грузоподъёмности. На некоторые модели цены, вообще, не указываются и все уточняется при конкретном заказе на покупку выбранного ГКР. Большинство видов ГКР – мультикоптеры, используются конструкции с 6-ю, 8-ю и более пропеллерами. Некоторые из них снабжены специальными держателями и/или съемными захватами грузов. Общий вид нескольких ГКР приведен на рис.4. Имеющаяся информация в СМИ и данные табл. 1, показывают, что ГКР с максимальной грузоподъемностью 15 кг, реализованы несколькими фирмами и имеются на рынке. Однако, оценка массы нашего оптического ретранслятора несколько превышает эту величину и, следовательно, и его стоимость.
 а)
а)
 в)
в)
Рисунок 4. Общий вид нескольких ГКР: а) на коптере – 8 пропеллеров; в) коптер снабжен съемными захватами
III. ПУТИ СНИЖЕНИЯ МАССЫ АППАРАТУРЫ РЕТРАНСЛЯТОРА
Чтобы «вписаться» в эту категорию ГКР «среднего класса» по грузоподъёмности, есть несколько возможностей: 1) снижение массы корпусов оптических модулей; 2) снижение массы аккумуляторной батареи. 1) Для снижения массы корпуса модуля «БОКС» предлагается замена материала корпуса на Al, при тех же габаритах, и уменьшение его толщины в 2 раза. При этом, снижение массы одного модуля превышает ~ 1 кг. 2) Для снижения массы аккумуляторной батареи предполагается использовать новые высокоэффективные материалы на основе литий – полимеры (Li – NMC). При этом, суммарное снижение массы аккумуляторов превышает ~ 2 кг. Это заключение подтверждается [5, с. 2] графиком на рис. 5. На нем: вертикальная ось – объемная плотность энергии, Вт ч/П (П- объем батареи); горизонтальная ось – гравиметрическая плотность энергии, Вт ч/кг.

Рисунок 5. Области параметров современных аккумуляторов на основе разных материалов: 1) Li – Sulfur; 2) Si – based, Li – ion; 3) Li – NMC
Дополнительное снижение массы аккумуляторов на 1 – 1,5 кг на квадрокоптере, может быть реализовано за счет использования энергоснабжения гибридного типа, реализованного на ГКР Airborg H8 10K. Таким образом, проведя модернизацию модулей системы «БОКС», в соответствии с пп. 1 – 2, можно снизить массу аппаратуры на величину ∆ М (∆ М = 2 х 1 кг + 2 кг + 1,5 кг = 5,5 кг), превышающую 5 кг. Эти модификации позволяют «вписаться» в весовую категорию коммерческого варианта носителя оптического ретранслятора – ГКР Airborg H8 10K.. Размеры восьмироторного беспилотника (БПЛА) Airborg H8 10K., составляют 1950 х 1500 х 1500 мм, он оснащен пропеллерами из углеволокна. Время полета – 3 часа с нагрузкой до 4-х кг, 1 час – с нагрузкой до 15 кг. Максимальная скорость полета коптера – 64 км/ч, максимальная дальность полета -160 км, возможность полета при ветре до 56 км/ч. Система автопилотирования AAS производства Top Flight Technologies контролирует настройки систем БПЛА и следит за состоянием гибридной системы питания, которая включает в себя электродвигатель, бензобак и литий – полимерный аккумулятор емкостью 6000 мАч (50 В). На борту ГКР также расположены: стабилизаторы, твердотельный накопитель полетной информации и дистанционный приемопередатчик с радиусом действия до 3,2 км.
IV. КАЧЕСТВЕННОЕ ОПРЕДЕЛЕНИЕ ВЫСОТЫ ГКР
Наряду с уменьшением стоимости системы (∆С), за счёт снижения массы аппаратуры ∆М, возможно снижение ∆С за счет уменьшения объёма технических сервисов. Как известно, современные эффективные коптеры «легкого» и «среднего» класса по грузоподъёмности, содержат аппаратуру определения их местоположения в плоскости и по высоте. Уже достигнуты хорошие точности в определении координат на местности. Повышение точности определения h, облегчает решение задачи наведения и удержания оптической связи между наземными модулями системы связи и модулями, установленными на грузовом коптере. Точность измерений координат коптера с помощью ГЛОНАСС/GPS, зависит от конструкции и класса приёмника, числа и расположения спутников (в реальном времени), состояния ионосферы и атмосферы Земли (сильной облачности и т.д.), наличия помех и других факторов. "Бытовые" ГЛОНАСС/GPS - приборы, для "гражданских" пользователей, имеют, в среднем, реальную точность, при минимальной помехе, ± 5 – 15 метров в плане. Однако, по информации из СМИ, определение высоты объектов – значительно хуже. Если, использовать «коэффициент ухудшения» (Ку ) – 2,5 - 3,5, то даже при малом Ку = 2,5, оценки точности определения высоты h объекта, составляют: 5 – 38 м. Эта оценка соответствует оценкам из других источников информации: ± 10 м – при h = 50 м и ± 50 м, при h = 100 м. В нашей задаче, величина h = 50 - 60 – 80 м. При этом, с учетом реализации оптической системы ретрансляции для решения поставленной задачи, даже нижняя оценка точности определения h (0,1 h), и на пределе, не «подходит». А верхняя оценка (более 0,5 h) – совершенно не приемлема. Средняя величина – 0,25 h - так же малопривлекательна, хотя применяется сложная система спутникового мониторинга.
Возможен некоторый альтернативный метод определения высоты квадрокоптера над Землей h. Он базируется на том, что сейчас, информация с видеокамеры ГКР, как правило, передается на пульт управления или экран встроенного смартфона. При высоком качестве передачи, наблюдаемые объекты могут быть визуально хорошо различимы.
Был поставлен ряд натурных экспериментов (рис. 6) по передаче фото легковых авто, снятых с разной высоты h. Визуальное сравнение приведенных фото, показывает, что размеры авто на фото (А) и (в) сильно отличаются, а габаритные размеры авто на рис. (А) и (и), практически совпадают. Причем, точно известно, что высота съёмки фото - (и) составляла 21 м (балкон 7-го этажа 12-ти этажного жилого дома. Высоты съёмки фото – с), в) – 18 м, 15 м, соответственно. При использовании «шлема» в аппаратуре оператора, степень различения объектов ещё более повышается, за счет снижения фоновых помех и повышения контрастности изображений.
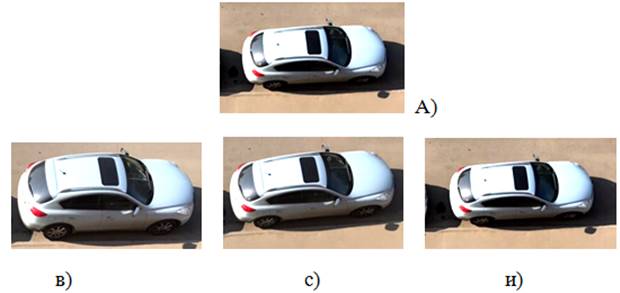
Рисунок 6. Фото авто: А) – наблюдаемый объект; в), с), и) - снятые с помощью бытовой видеокамеры смартфона, с разной высоты, с шагом 3 м.
Можно сказать, что точность определения высоты, с помощью приведенных фото - не более 3 м, и она вполне объективна (с учетом некоторых погрешностей любительской съемки – даже без штатива и без точного позиционирования (выбора ракурса съёмки) объектов. Таким образом, точность определения h ГКР в предложенном методе оказывается почти в 2 раза выше оценки наилучшей точности, при использовании системы ГЛОНАСС/GPS и более чем в 10 раз выше, чем при оценке худшей точности. Это обстоятельство может послужить основой для отказа от сервиса ГЛОНАСС/GPS в ГКР в позиции определения h объекта, что позволяет снизить стоимость всей системы.
V. ОЦЕНКИ ВИБРАЦИИ КОРПУСА
В оптической системе передачи сигналов, необходима прямая видимость между передающим и приемным модулями при малых оптических апертурах. Поэтому, требуются оценки вибрации корпуса ретранслятора. Для оценки вибрации коптера, на нем закрепляли лазерный излучатель видимого диапазона [3, с. 35]. На экране, установленным на земле, измерялись блуждания пятна лазерного излучения, за счет вибрации, во времени. Временной интервал между последовательными измерениями N, составлял 10 с. Зависимости изменения угла наклона лазерного излучения в открытом пространстве (измерения проводились во дворе, у фасадной стены Университета) для квадрокоптера MPP (h = 3,0 м) приведены на рис. 7. Подробное сопоставление полученных графиков для коптеров разного типа, показывает, что: во-первых, изменения угла наклона лазерного излучения в открытом пространстве, носят случайный характер. Во-вторых, естественно, в среднем, собственно углы наклона лазерного излучения при высоте квадрокоптера MPP h = 3,0 м меньше, чем при других, меньших h, используемых в проведенных экспериментах. В-третьих, в среднем, собственно углы наклона лазерного излучения, измеренные в опытах на МРР в два раза меньше, чем на SYMA, их максимальное значение не превышает ~ 20 мрад. Результаты 3-го пп. обусловлены, в первую очередь, наличием на МПП датчика высоты, гироскопов и стабилизаторов.

Рисунок 7. Зависимость изменения угла наклона лазерного излучения в помещении для квадрокоптера DJI MPP, h =1,2 м (● - эксперимент)
VI. ЗАКЛЮЧЕНИЕ
1. Экспериментальные изменения углов наклона лазерного излучения в в открытом пространстве и в помещении, при использовании лазерного излучателя носят случайный характер.
2. В среднем, собственно флуктуации углов наклона лазерного излучения, измеренные в опытах на МРР, меньше чем на других коптерах и в два раза меньше, чем на SYMA.
3. Проведенные эксперименты показали, что наибольшими перспективами в оптическом диапазоне, обладают квадрокоптеры с более совершенной стабилизацией в обоих системах ретрансляции сигналов.
