Автоматизированный синтез нечетких регуляторов для промышленных объектов
Конференция: I Международная заочная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Информатика, вычислительная техника и управление

I Международная заочная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Автоматизированный синтез нечетких регуляторов для промышленных объектов
Automated fuzzy controllers design for industrial plants
Kazachek Nina Aleksandrovna,
Assistant, Moscow Technological University (MIREA), Russia, Moscow
Ryabcov Vladimir Andreevich
Trainee researcher of scientific laboratory of the Control Problems Department,
Moscow Technological University (MIREA), Russia, Moscow
Аннотация. В настоящей работе предлагается решение задачи автоматизированного синтеза нечеткого регулятора для промышленных объектов. На основе проведенных теоретических исследований разработан алгоритм синтеза структуры и параметров нечеткого регулятора на основе данных о модели промышленного объекта управления и требований к качественным характеристикам САУ, который доведен до программной реализации.
Abstract. In this paper, the solution of the automated fuzzy controller design for industrial plants is offered. On the basis of theoretical research, synthesis algorithm of structure and parameters of fuzzy controller based on the model of the industrial plants and qualitative requirements data to ACS is designed and brought to the software implementation.
Ключевые слова: нечеткий регулятор; автоматизированный синтеза; параметры нечеткого регулятора; автоматизация настройки и синтеза; промышленные объекты.
Keywords: fuzzy control, ,automated design, the parameters of the fuzzy controller, automation of settings and synthesis, industrial plants.
В рамках проведенных исследований авторами в [1, 4] показано, что нечеткий регулятор во многих случаях может обеспечить существенно лучшие (по сравнению с классическим ПИД-регулятором) качественные характеристики процесса управления (в частности, время регулирования и перерегулирования).
Объясняется это тем, что нечеткий регулятор реализует нелинейное преобразование, с помощью которого можно не только повысить быстродействие САУ, но и обеспечить уменьшение ошибки от действия возмущения. Характер этого нелинейного преобразования зависит от параметров нечёткого логического вывода (НЛВ), таких как вид и число функций принадлежности, их взаимное расположение, база правил и т.д. таким образом, меняя (на программном уровне) параметры НЛВ, можно менять (настраивать) характер нелинейного преобразования и, соответственно, обеспечивать требуемые показатели качества управления [4, 1].
В данной работе разрабатывается методика построения желаемого нелинейного преобразования путем вариации параметров НЛВ. На основании проведенных исследований [1, 4, 2] создана методическая база для построения трехканальных (П-, И-, Д-) нечетких регуляторов, на основе которой решается задача создания программно-алгоритмического комплекса для автоматизированного синтеза нечетких регуляторов.
Основные этапы обобщенной реализации алгоритма [4] для любого типа объекта управления (статического или астатического) можно описать следующим образом:
1. Считывание введенных пользователем параметров объекта управления, входной уставки и величины внешнего возмущения, а также требований к показателям качества синтезируемой САУ;
2. Определение предельного коэффициента усиления линейной системы;
3. Определение коэффициента П-регулятора, обеспечивающего требуемую величину установившейся ошибки (помимо случая отработки ступенчатого сигнала без внешних воздействий в астатических САУ). Определение устойчивости САУ с рассчитанным коэффициентом;
4. Синтез классического ПИД-регулятора методом Зиглера-Никольса;
5. Определение показателей качества САУ;
6. Синтез нечеткого П-регулятора, настройка нелинейного преобразования П-канала регулятора – применение алгоритма расчета контрольных точек (алгоритм РКТ) перелома нелинейного преобразования, описанного в [4];
7. Проверка системы с синтезированным нечетким П-регулятором на устойчивость с помощью модифицированного метода гармонического баланса;
8. В случае невыполнения всех требований к показателям качества - синтез И и\или Д-каналов нечеткого регулятора с аналогичным применением алгоритма РКТ перелома нелинейности;
9. Вывод на экран результатов синтеза: переходный процесс системы с синтезированным нечетким регулятором (НР), набор параметров синтезированного НР.
Каждый этап представляет собой завершенный программный модуль. После выполнения всех шагов алгоритма, программа выводит на экран результаты синтеза: параметры нечеткого регулятора, вид нелинейной характеристики, переходной процесс и анализ устойчивости (рис.1).
За счет правильного выбора параметров нелинейного преобразования даже нечеткий П-регулятор дает хорошие показатели.
Наращивая структуру регулятора путем добавления нечеткого И-канала можно обеспечить высокое качество управления в следящих системах при отработке сложных входных воздействий. Кроме того, на основе построенного трехканального (П-, И-, Д-) НР и возможности реализовать практически любые нелинейные преобразования открывается возможность создания четырехканальных нечетких регуляторов, в которых четвертый канал используется для компенсации внешних возмущений.
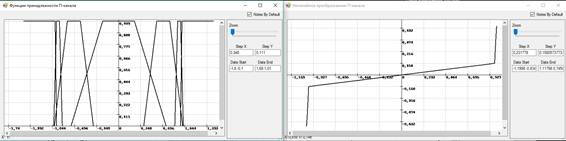

Рисунок 1. Результаты работы программного комплекса.
Необходимо отметить, что системы управления с нечеткими регуляторами – это новый класс систем, методика исследования которых пока разработана недостаточно и, что не менее важно, не адаптирована к требованиям широкой инженерной практики. Представление нечеткого регулятора в виде нелинейного преобразования, полученное авторами в [3,4], обеспечило возможность модификаций методов теории нелинейных САУ применительно к нечетким САУ.
Несмотря на то, что представление нечеткого регулятора в виде нелинейного преобразования вносит существенную ясность в создание методики исследования нечетких САУ, проблема синтеза нечеткого регулятора остается достаточно сложной, поскольку число настраиваемых параметров существенно больше, чем в традиционном ПИД – регуляторе.
Поэтому в работе решена задача создания программно-алгоритмического комплекса для автоматизированного синтеза нечетких регуляторов (АСНР).
Алгоритм работы комплекса АСНР построен на методике синтеза, обобщающей все этапы теоретических исследований авторов [1-4], программное обеспечение написано на языке C# . Приведены соответствующие инструкции программиста и пользователя. Экспериментальные исследования, проведенные на примерах нечетких систем управления промышленными объектами, показали, что время синтеза нечеткого регулятора составляет 1-5 минут (в зависимости от числа каналов синтезируемого нечеткого регулятора). Разработанный программный комплекс АСНР передан на эксплуатацию кафедре проблем управления МИРЭА для выполнения курсового проектирования и выпускных квалификационных работ по направлениям «Мехатроника и робототехника» (профиль «Автономные роботы») и «Управление в технических системах» (профиль «Автономные информационно-управляющие системы»).
Список литературы:
1. Интеллектуальные системы автоматического управления/Макаров И.М., Лохин В.М. и др., М.: ФИЗМАТЛИТ, 2001. — 576с.
2. Научно-технический отчет по годовому этапу научно-исследовательской работы № 784 в рамках базовой части государственного задания в сфере научной деятельности по Заданию № 2014/112 за 2015 год.
3. Ч.1. Нечеткие регуляторы (методика построения, примеры), эл. уч. пособие серии «Интеллектуальные регуляторы и системы управления»/Казачек Н.А., Лохин В.М. и др. МИРЭА, 2014.
4. Ч.2. Анализ и синтез систем управления с нечеткими регуляторами, эл. уч. пособие серии «Интеллектуальные регуляторы и системы управления»/Казачек Н.А., Лохин В.М. и др. МИРЭА, 2015.
