Статья:




РЕШЕНИЕ ЗАДАЧ АВТОМАТИЗАЦИИ ПРОЦЕССА КЛИНИНГА БОРТОВЫХ ЧАСТЕЙ МОРСКИХ И РЕЧНЫХ СУДОВ НИЖЕ ВАТЕРЛИНИИ
Секция: Технические науки
Выходные данные
Манаева А.А. РЕШЕНИЕ ЗАДАЧ АВТОМАТИЗАЦИИ ПРОЦЕССА КЛИНИНГА БОРТОВЫХ ЧАСТЕЙ МОРСКИХ И РЕЧНЫХ СУДОВ НИЖЕ ВАТЕРЛИНИИ // Технические и математические науки. Студенческий научный форум: электр. сб. ст. по мат. LXXII междунар. студ. науч.-практ. конф. № 5(72). URL: https://nauchforum.ru/archive/SNF_tech/5(72).pdf (дата обращения: 03.04.2025)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

LXXII Студенческая международная научно-практическая конференция «Технические и математические науки. Студенческий научный форум»
РЕШЕНИЕ ЗАДАЧ АВТОМАТИЗАЦИИ ПРОЦЕССА КЛИНИНГА БОРТОВЫХ ЧАСТЕЙ МОРСКИХ И РЕЧНЫХ СУДОВ НИЖЕ ВАТЕРЛИНИИ
Манаева Анастасия Александровна
студент, Сибирский государственный университет, РФ, г. Красноярск
Сопротивление трения корпуса судна при движении по воде может составлять от 45% до 90% от общего сопротивления, испытываемого судном[2], и может увеличиваться на 6-80% за счет обрастания корпуса водорослями, морской травой, ракушками и другими биологическими загрязнениями. Добавленное сопротивление на 30% из-за умеренного био-обрастания корпуса танкера может увеличить расход топлива судна до двенадцати тонн в сутки. Результатом являются дополнительные затраты на эксплуатацию судна, а также увеличение выбросов. Соответственно, существует множество методов, используемых для снижения вероятности биообрастания и/или избавления корпусов судов от биообрастания посредством очистки.
Например, специальные краски и покрытия для корпуса используются, чтобы снизить вероятность биологического обрастания, но такая обработка не всегда работает надежно и может требовать частого применения. Такие методы могут быть связаны со значительными затратами времени, поскольку судно часто приходится стоять в сухом доке в течение длительного периода времени, пока наносится краска и/или покрытие.[3]
Обычно, когда судно находится у причала и/или в нормальных условиях разгрузки, корпус периодически очищается вручную с помощью пескоструйных аппаратов или с использованием моторизованных щеток. Однако стоимость такой процедуры очистки также высока, поскольку очистка такого типа может потребоваться часто. В некоторых случаях ручная очистка корпуса проводится каждые десять-двадцать месяцев, а в других случаях при необходимости и раньше.[1]
К сожалению, у ручных методов очистки есть существенные недостатки. Например, поскольку процедура выполняется, когда судно находится у причала, остатки чистящих средств и мусор (например, стружки краски и т. д.) сбрасываются на мелководье, окружающем доки. По этой причине во многих юрисдикциях эта практика объявлена незаконной, особенно из-за токсичности противообрастающей краски, загрязняющей воду.
Также оба приведенных метода очистки судов связаны с непосредственным использованием человеческого труда для этой работы, что сопряжено с влиянием человеческого фактора при работе .
Например, незнание о потенциальных опасностях, неосторожность при работе связанных с очисткой судна, может привести к принятию рискованных решений, которые могут поставить под угрозу безопасность работника или поломке очищающего оборудования.
В настоящее время активно разрабатываются новым автоматизированные системы\решения, устраняющие недостатки описанных ранее методов очистки судов.
Одним из таких решений может быть беспилотный плавательный аппарат автоматизирующий процесс чистки судов разрабатываемый студентами Сибирского государственного университета науки и технологий. Данное решение относится к области подводной робототехники, в частности к необитаемым подводным аппаратам морского или речного назначения.

Рисунок 1. 3D модель разрабатываемого аппарата
Аппарат состоит из корпуса в виде овала вращения, вакуумной подушки состоящей из винила или технической резины, создающей пространство для вакуумного крепления, очищающих щеток, ультразвукового модуля чистки и гусениц, обеспечивающий передвижение аппарата по очищаемой поверхности. Прилипание дрона к очищаемой поверхности производится с помощью вакуумной системы состоящей из насоса и вакуумной подушки. Для более наглядного представления 3D модель аппарата представлена на рисунке 1.
Щетки для чистки касаются очищаемой поверхности и крутящим движением вокруг своей оси соскабливают крупнодисперсные частицы грязи. Ультразвуковой модуль обеспечивает удаление мелкодисперсных загрязнений. В сумме использование этих двух методов в аппарате дает уровень очистки сопоставимый с ручным и при этом полностью автоматизированный.
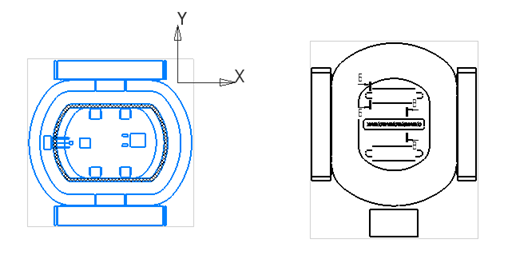
Рисунок 2. Вид аппарата сверху и снизу
Данное решение может как частично так и практически полностью автоматизировать процесс очистки бортовой части судов за счет того что аппарат обладает возможностью работы в автономном режиме ориентируясь и строя свой маршрут основываясь на показаниях датчиков(таких как датчики касания, датчики света) и телеметрии с камер установленных на аппарате.
Работа выполнена при финансовой поддержке Гранта межрегионального конкурса юных техников-изобретателей Енисейской Сибири (Разработка беспилотного плавательного аппарата для очистки судов ниже ватерлинии)
Список литературы:
1. Средства очистки кораблей // Сайт. - URL: https://ems-rus.com/articles/sredstva-dlya-ochistki-korablej/?ysclid=lvy03cx0sh42779700#1(дата обращения 4.04.2024)
2. Сайт. - URL: Глава 10 Сопротивление воды движению судна (studfile.net) Глава 10 Сопротивление воды движению судна (дата обращения 4.04.2024)
3. Отличительная особенность судовых красок // Сайт. - URL: https://www.delo-kraski.ru/marine-paints-feature/?ysclid=lvy14ui4ut448224408(дата обращения 4.04.2024)
