Статья:




Планирование движения автономного мобильного робота
Конференция: XXVIII Студенческая международная научно-практическая конференция «Молодежный научный форум»
Секция: Технические науки
Выходные данные
Зикеева Е.А., Александрова Д.Д. Планирование движения автономного мобильного робота // Молодежный научный форум: электр. сб. ст. по мат. XXVIII междунар. студ. науч.-практ. конф. № 27(28). URL: https://nauchforum.ru/archive/MNF_interdisciplinarity/27(28).pdf (дата обращения: 25.12.2024)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

XXVIII Студенческая международная научно-практическая конференция «Молодежный научный форум»
Планирование движения автономного мобильного робота
Зикеева Елизавета Александровна
студент, Московского технологического университета, Россия, г. Москва
Александрова Дарья Дмитриевна
студент, Московского технологического университета, Россия, г. Москва
Навигационные системы автономного мобильного робота (АМР), все больше применяются для навигации и выполнения целенаправленных задач в сложных областях и в различных пространствах. Хотя нечеткие системы были успешно применены в большом количестве приложений, они испытывают недостаток в способности извлекать знания из набора обучающих данных. Гибридная технология, разработанная путем объединения нечетко-логической системы поиска с возможностями генетического алгоритма (ГА) должна привести к выбору оптимального маршрута до заданного пункта.
В данном докладе предлагается применение метода нечетко-генетического управления АМР для моделирования в неструктурированной (неизвестной) окружающей среде при следующих ограничениях и допущениях:
- Двумерная окружающая среда делится на квадраты;
- Робот сканирует информацию до 6 квадратов сетки;
- Движение робота ограничивают только статические препятствия.
- Препятствия представлены занимаемой сеткой;
- Робот движется с постоянной скоростью;
Для решения задачи нечеткого логического управления (НЛУ) роботом применяем алгоритм Мамдани. Данный алгоритм описывает несколько последовательно выполняющихся этапов и состоит из следующих блоков.
- Блок фаззификации (БФ) - процедура нахождения значений функции принадлежности нечетких множеств (термов) на основе обычных (четких) исходных данных. Разделим расстояние равное 6-ти квадратам на подмножества со следующими термами: далеко (Д), среднее (С), близко (Б) и очень близко (ОБ). Вокруг робота, область будет сканироваться на 360 ˚. Эта область будет разделена на восемь подмножеств со следующими термами: задний (З), задний левый (ЗЛ), левый (Л), передний левый (ПЛ), передний (П), передний правый (ППр), правый (Пр), задний правый (ЗПр). Функции принадлежности (ФП) представляют собой графическое представление входных и выходных подмножеств. В НЛУ используются одни и те же ФП для входных и выходных подмножеств, и допускает два входных подмножества для одного набора правил и четыре для другого набора правил.
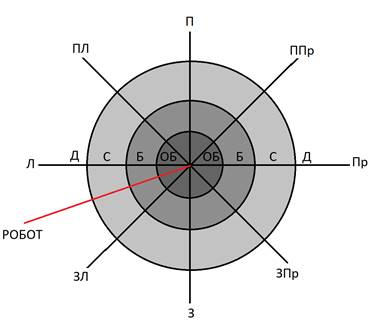
Рисунок 1. Графическое представление БФ
- База знаний (БЗ) - происходит формирование базы правил вида «α есть β» с помощью связок «И», «ЕСЛИ - ТО». База знаний для НЛУ состоит из двух наборов нечетких продукционных правил для прямолинейного движения и преодоления препятствий. Набор для прямолинейного движения будет состоять из 24 нечетких правил следующего вида:
ЕСЛИ угол движения к цели передний И расстояние движения далеко, ТО нужное направление является переднее и желаемое расстояние далеко.
Набор для объезда препятствий будет состоять из 168 нечетких правил следующего вида:
ЕСЛИ угол движения к цели передней, расстояние движения очень близко И угол поворота передний левый, расстояние движения далеко, ТО нужное направление передний левый и желанное расстояние далеко.
При формировании базы знаний (192 правила) системы нечеткого вывода задаются весовые коэффициенты для каждого правила.
- Блок рассуждений (БР) – вычисляются степени истинности и принадлежности левых частей, модифицируются подмножества правой части правила в соответствии с левой частью методом «произведения», выполняется объединение (суперпозиция) модифицируемых подмножеств методом «максимума».
- Блок дефаззификации (БД) - процесс нахождения обычного (не нечеткого) значения выходной переменной. Результат дефаззификации определяется по методу центра тяжести, в котором значение i-ой выходной переменной рассчитывается по формуле:
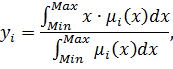
где:
 — функция принадлежности соответствующего нечеткого множества
— функция принадлежности соответствующего нечеткого множества  ;
;
Min и Max — границы универсума нечетких переменных;
 — результат дефаззификации.
— результат дефаззификации.
Алгоритм примечателен тем, что он работает по принципу «черного ящика». На вход поступают количественные значения, на выходе они же. На промежуточных этапах используется аппарат нечеткой логики и теория нечетких множеств.
Очевидно, что робот нуждается в меньшем количестве правил, которые будут использоваться для достижения цели. Для нахождения оптимального набора правил используется ГА, основанный на механизмах естественного отбора и наследования. В этом подходе переменные, характеризующие решение, представлены в виде вектора генов. ГА генерирует новые решения как различные комбинации частей решений популяции, используя такие операторы, как отбор, рекомбинация (кроссинговер) и мутация.
В данной нечетко-генетической системе начальная популяция устанавливается случайным образом и численность популяции субъективна. С помощью функции пригодности (приспособленности) среди всех решений «популяции» выделяют наиболее подходящие решения. Которые получают возможность «скрещиваться» и давать «потомство», а наихудшие решения удаляются из «популяции». Будем использовать следующую функцию пригодности правила:
П = М – К + (Ц*5) – (Р*5),
где
П – пригодность правила;
М – максимально допустимое число шагов робота;
К – количество шагов, робота для достижения к цели;
Ц – принимает положительное значение (+1), если удается достичь цели и отрицательное значение (-1), если это не удается. Умножается на 5 что бы увеличить значение пригодности;
Р – оставшееся расстояние от текущей позиции робота до целевой. Рассчитывается по следующей формуле: Р = ((текущая позиция - целевая позиция) / (исходное положение - конечное положение)) * 100. Умножается на 100 что бы увеличить результат.
Схемы кодирования базы знаний в генетической строке оказывают существенное влияние на эффективность ГА и играет важную роль в разработке методологии. Хотя большинство приложений ГА используют двоичный код для представления переменных, здесь следует использовать реальные значения (термы входных и выходных переменных нумеруются). Такая схема кодирования может кодировать каждую возможную комбинацию нечетких переменных в хромосоме и не подвергает ограничениям в отношении разработки нечетких правил.
Графическое представление предлагаемого метода изображено на рисунке 2.
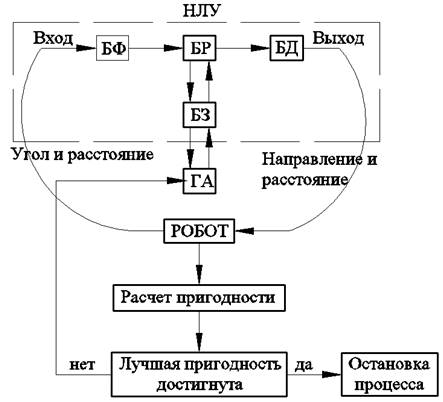
Рисунок 2. Графическое представление метода
Для реализации нечетко-генетического алгоритма предлагается использовать объектно-ориентированный подход.
В качестве экспериментальной модели собран робот колёсный робот, составные части которого – микропроцессор, 3 колеса, серводвигатель, корпус и две кнопки под корпусом спереди и сзади робота. Кнопки являются датчиком столкновения с препятствием.
Список литературы:
1. Болотова Л.С. Системы искусственного интеллекта: модели и тех-нологии, основанные на знаниях. – М.: Финансы и статистика, 2012. – 663 с.
2. Колесников А. В. Гибридные интеллектуальные системы – СПб.: Питер, 2001. – 710 с.
3. Вьюгин В. В. Математические основы машинного обучения и про-гнозирования – М.: МЦНМО, 2013. – 391 с.
