Статья:




ИССЛЕДОВАНИЕ АРХИТЕКТУР СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ ДЛЯ ДЕМОНТАЖНОГО РОБОТА
Конференция: CCXLI Студенческая международная научно-практическая конференция «Молодежный научный форум»
Секция: Технические науки
Выходные данные
Калинин А.М. ИССЛЕДОВАНИЕ АРХИТЕКТУР СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ ДЛЯ ДЕМОНТАЖНОГО РОБОТА // Молодежный научный форум: электр. сб. ст. по мат. CCXLI междунар. студ. науч.-практ. конф. № 9(241). URL: https://nauchforum.ru/archive/MNF_interdisciplinarity/9(241).pdf (дата обращения: 29.04.2025)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

CCXLI Студенческая международная научно-практическая конференция «Молодежный научный форум»
ИССЛЕДОВАНИЕ АРХИТЕКТУР СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ ДЛЯ ДЕМОНТАЖНОГО РОБОТА
Калинин Андрей Михайлович
студент, Московский Государственный технический университет им Н.Э. Баумана – МГТУ им Н.Э. Баумана, РФ, г. Москва
INVESTIGATION OF VISION SYSTEM ARCHITECTURES FOR A DEMOLITION ROBOT
Andrei Kalinin
Student, Bauman Moscow State Technical University - BMSTU, Russia, Moscow
Аннотация. В данной статье представлен анализ существующих архитектур системы технического зрения, применяемых в мобильных системах. Была представлена базовая архитектура системы технического зрения, а также проведен анализ основных архитектур СТЗ для использования в демонтажном роботе. Основываясь на проведенном исследовании, был предложен алгоритм работы системы технического зрения, а также разработана функциональная схема системы технического зрения. Полученные результаты имеют значение для дальнейшего исследования и реализации системы технического зрения демонтажного робота.
Abstract. This paper presents an analysis of existing vision system architectures used in mobile systems. The basic architecture of vision system was presented, and the basic architectures of vision system for use in demolition robot were analyzed. Based on the study, an algorithm for the vision system was proposed. A functional diagram of the vision system was developed. The obtained results are of significance for further research and realization of the vision system of the dismantling robot.
Ключевые слова: демонтажный робот, мобильный робот, система технического зрения, компьютерное зрения, робот Brokk.
Keywords: demolition robot, mobile robot, vision system, computer vision, Brokk robot
Введение. Демонтажные роботы становятся все более и более популярными в сфере строительства, заменяя более старое поколение - машины для сноса зданий (экскаваторы, демоляторы). Это происходит потому что, при использовании любой тяжелой машины расходуется большое количество электроэнергии или воды, которая снижает уровень пыли на площадке. А новые роботы, имеют возможность не только проводить работы практически без пыли, а еще и легко расчленять строительные отходы прямо на месте. Это позволяет экономить на транспортировке отходов к месту их переработки, а затем назад на площадку для повторного использования.
Демонтажные роботы используются в строительной отрасли для сноса зданий в конце их жизненного цикла. Эти мобильные роботы являются относительно новой формой профессиональных сервисных роботов и используют различные инструменты на конце манипулятора, такие как бетонные дробилки, буры, ковши или многофункциональные захваты для разрушения строительных материалов. Большинство таких роботов похожи на небольшие экскаваторы, только без кабины, и предназначены для того, чтобы наносить мощный удар в небольшом пространстве, проходящем через дверные и лестничные проемы. В настоящее время демонтажные роботы занимают 90% всего рынка строительных роботов. Это одни из первых коммерчески жизнеспособных сервисных роботов, которые начали применяться в исторически трудоемкой отрасли. [1]
В ходе данной научной статьи будет более подробно рассмотрена и выбрана структура системы технического зрения для демонтажного робота.
Выбор конструкции робота для демонтажных работ. В ходе предыдущих работ основа для дальнейшей реализации системы технического зрения демонтажного робота было решено использовать робот Brokk 250, как основу для проведения работы. Данная модель представлена на рисунке 1, а основные технические характеристики представлены в таблице 1.

Рисунок.1 The Brokk 250
Таблица 1.
Основные технические характеристики демонтажного робота The Brokk 250
|
Скорость вращения башни, сек/360о |
16 |
|
Скорость движения, макс. км/ч |
2,8 |
|
Преодолеваемый уклон, макс, o |
40 |
|
Мощность электродвигателя, кВТ |
22 |
|
Горизонтальный вылет стрелы, макс, м |
6,5 |
|
Вертикальный вылет стрелы, макс, м |
6,5 |
|
Масса конструкции, кг |
До 3600 |
|
Масса навесного оборудования, кг |
До 350 |
Обзор систем технического зрения для демонтажных роботов. Система технического зрения - это система, обеспечивающая обнаружение, автоматический контроль и анализ объектов по их изображениям.[6]
- В основном используется в промышленности для контроля качества продукции в режиме реального времени для сокращения отходов и простоев
- Может точно и согласованно выполнять сложные и повторяющиеся задачи на высокой скорости
- Может также использоваться в качестве измерительной системы или системы управления роботом для выполнения таких действий, как подъем и перемещение объектов
- Все системы технического зрения имеют датчик изображения и программное обеспечение контроля для обработки изображений и определения выходного сигнала системы
Получаемое от системы изображение обрабатывается для получения функций, которые будут использоваться для уменьшения ошибки между текущей и желаемой целью. Это обусловлено тем, что видеокамеры обеспечивают самую высокую пропускную способность данных среди всех существующих датчиков.
Методология и математический подход каждого алгоритма отслеживания объектов при помощи системы технического зрения очень разнообразны. Обычно используемый алгоритм зависит от выполняемой задачи.
В случае демонтажного робота необходимо реализовать такой алгоритм технического зрения, который будет распознавать элементы строительных конструкций и выработки последовательности разрушения.
Этапы работы базовой системы технического зрения представлены ниже:
- Поиск объекта
- Захват изображения (с помощью правильного освещения, фокусного расстояния, светофильтров)
- Этапы контроля по захваченному изображению
- Вывод результатов
В своей работе СТЗ зачастую использует различные методы обработки информации, такие как: декодирование, сравнение шаблоном, сегментирование и другие.
Основными достоинствами систем технического зрения являются:
- Относительно простой интерфейс, что обеспечит быструю подготовку операторов и меньше затрат денежных средств
- Возможность непрерывной работы
- Готовность к работе сразу после настройки
- Повышенная скорость работы и производительность, относительно полного управления оператором
- Повышенная безопасность, в виду того, что бригадой роботов может управлять один оператор, находящийся на безопасном расстоянии от места проведения работ
- Максимальная точность измерений
- Фиксированные допустимые пределы, которые могут быть обновлены в программном обеспечении и скопированы на все системы
- Многофункциональность
Рассмотрим принцип работы базовых систем технического зрения, а также их архитектуру.
Принцип работы СТЗ и базовая архитектура. Принцип работы системы технического зрения: Система технического зрения обнаруживает неподвижный или движущийся объект, захватывает изображение этого объекта, проверяет определенные свойства этого изображения, а затем передает результаты различных этапов контроля. В случае СТЗ демонтажного робота объект будет неподвижным.[7]
В системе технического зрения информация об изображении, при помощи оптико-электронных преобразователей и видеодатчиков, представляется в форме электрических сигналов. Это по существу первичное преобразование. Обычно изображение считывается при помощи оптической камеры, чувствительного элемента, сканирующего устройства, затем сигнал усиливается.
Полученная таким образом информация обрабатывается иерархически. Сначала изображение обрабатывается видеопроцессорами. Здесь ключевой параметр — контур изображения, который задается координатами множества составляющих его точек. Далее компьютером, входящим в состав системы, формируются управляющие сигналы для робота.[8]
Видеодатчики присоединяются к другим частям системы технического зрения при помощи особых кабелей, например, оптоволоконных, через которые информация передается на высокой частоте и с минимальными потерями.
Сами видеодатчики могут иметь точечные, одномерные или двумерные чувствительные элементы. Точечные чувствительные элементы способны принимать видимое излучение с мелких частей объекта, и для получения полного растрового изображения необходимо произвести сканирование по плоскости. Была разработана схема базовой архитектуры СТЗ, представленная на рисунке 2.
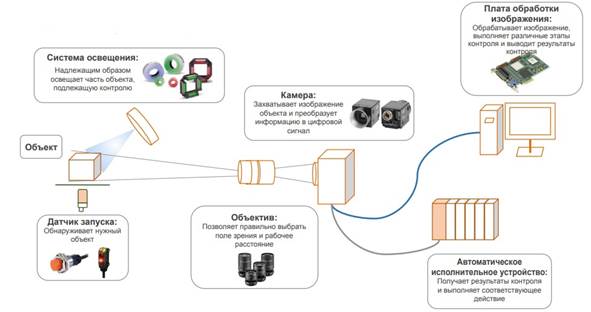
Рисунок 2. Базовая архитектура СТЗ
Рассмотренные типы СТЗ. Рассмотрим типы СТЗ, которые можно использовать для робототехнического комплекса для демонтажа конструкций и выберем подходящий тип.[9]
Различают 3 основных архитектуры систем технического зрения:
- Интеллектуальная камера
- Датчик изображения с контроллером
- Датчик изображения и ПК
Рассмотрим отличия данных архитектур. Основные отличия каждой рассмотрены в таблице 2.
Таблица 2.
Различные типы СТЗ
|
Тип СТЗ |
Интеллектуальная камера |
Датчик изображения с контроллером |
Датчик изображения и ПК |
|
Стоимость |
Низкая |
Средняя |
Высокая |
|
Настройка |
Простая, необходимо подать питание и подключиться к программному обеспечению |
Сложная |
Сложная |
|
Компоненты |
Отдельная камера со встроенным объективом, освещением и платой обработки изображения |
Камера с регулируемым объективом и светофильтрам, а также внешним освещением. Плата обработки изображения в общем контроллере |
Камера с регулируемым объективом и светофильтрами, и внешним освещением. Плата обработки изображения для ПК |
|
Качество/Точность |
Низкое Фиксированная точность |
Высокое Регулируемая оптика |
Высокое Регулируемая оптика |
|
Особенности |
Простая в установке Малый размер |
Позволяет управлять несколькими камерами. Позволяет изменять параметры оптики |
Позволяет менять алгоритмы. Гибкая, более быстрая обработка |
На основе проведенного обзора, сделаем вывод, что для демонтажного робота больше всего будет подходить датчик изображения с контроллером, в виду своей относительной дешевизны, возможностью управлять несколькими камерами, а также относительной компактностью.
Архитектура выбранного типа СТЗ представлена на рисунке 3.
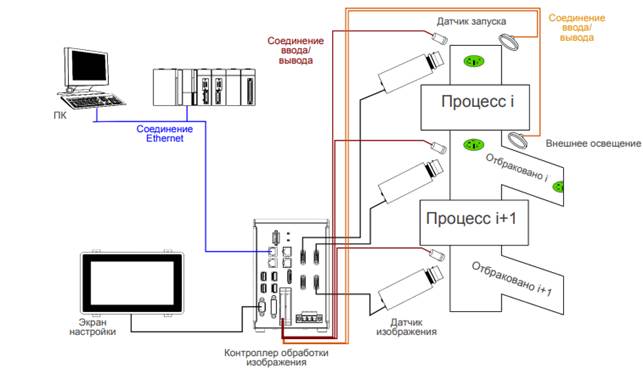
Рисунок 3. Архитектура выбранной СТЗ
Контроллер планируется интегрировать в существующий контроллер демонтажного робота, продемонстрированный на рисунке 4 для простоты управления как роботом, так и СТЗ.

Рисунок 4. Пульт управления робота The Brokk 250
На основании проведенного обзора систем технического зрения, был сделан вывод, что для работы робота, а также для ускорения всего процесса демонтажа необходимо реализовать систему технического зрения, а именно датчик изображения с контроллером, встроенный в пульт управления для полуавтономной работы робота. Однако, стоит отметить, что отсутствие оператора, даже при наличии системы технического зрения, в случае ошибки в коде робота, может привести к большим финансовым потерям. Решением данной проблемы будет введение системы, при которой оператор будет иметь возможность контролировать работу робота, а также остановить работу робота в случае чрезвычайной ситуации.
Функциональная схема СТЗ и алгоритм работы. Алгоритм работы СТЗ.
Был составлен алгоритм работы СТЗ демонтажного робота:
- Распознать элементы конструкции для демонтажа. На этом этапе были выделены следующие шаги:
- Уменьшение размерности - перевод изображения из цветного в изображение, состоящее из оттенков серого;
- Этап сегментации - выделение контуров имеющихся в кадре объектов;
- Этап кластеризации - определение в полученном бинарном изображение отрезков;
- Вспомогательные операции - определение точек пересечений прямых, на которых лежат оставшиеся диагональные отрезки;
- Этап принятия решений - определение величины и знака смещения центра масс полученного облака точек относительно центра изображения – этап принятия решений.
- Выбор режима работы определенным инструментом. На этом этапе производится выбор работы определённым инструментом, который заранее прикреплен к демонтажному роботу
- Выбор первого элемента разрушения. На этом этапе происходит выбор поверхности для демонтажа.
- Выбрать последовательность разрушения выбранного элемента. В большинстве случаев при разрушении поверхностей начинают с одного из верхних углов и идут сверху вниз.
- Повторить предыдущие этапы до выполнения поставленной задачи
Функциональная схема СТЗ. На основе выработанного алгоритма СТЗ, была реализована функциональная схема системы технического зрения демонтажного робота, представленная на рисунке 5.

Рисунок 5. Обобщенная функциональная схема СТЗ демонтажного робота
Заключение. В ходе данной статьи был проведен анализ существующих архитектур системы технического зрения, применяемых в мобильных системах. Была представлена базовая архитектура системы технического зрения, а также проведен анализ основных архитектур СТЗ для использования в демонтажном роботе. Основываясь на проведенном исследовании, был предложен алгоритм работы системы технического зрения. Была разработана функциональная схема системы технического зрения. Полученные результаты имеют значение для дальнейшего исследования и реализации системы технического зрения демонтажного робота.
Список литературы:
1. Demolition and Recycling [Электронный ресурс]. – Режим доступа: https://www.demolitionandrecycling.media/news/4-attachment-options-you-can-pair-up-with-demolition-robots/8018998.article – Дата доступа: 5.12.2022.
2. Консультант Плюс [Электронный ресурс]. – Режим доступа: http://www.consultant.ru/cons/cgi/online.cgi?req=doc&base=ESU&n=10477#2gSs7rS8c72Hk9Yn1. – Дата доступа: 5.12.2022.
3. Официальный сайт компании Brokk [Электронный ресурс]. – Режим доступа https://www.brokk.com/product/brokk-900/ Дата доступа: 10.12.2022.
4. Официальный сайт компании Husqvarna [Электронный ресурс]. – Режим доступа - https://www.husqvarnaconstruction.com/in/demolition-equipment/dxr315/ Дата доступа: 10.12.2022.
5. Интернет магазин спец техники Astramachine [Электронный ресурс]. – Режим доступа https://astramachine.ru/product/demontazhnyij-robot-avant-robot-185/ Дата доступа: 10.12.2022
6. КИПиА [Электронный ресурс]. – Режим доступа: https://kipia.ru/. – Дата доступа: 5.04.2023.
7. Интернет магазин Technored [Электронный ресурс]. – Режим доступа https://technored.ru/catalog/sense/tekhnicheskoe_zrenie/ - Дата доступа: 5.04.2023
8. Техническое зрения в САУ. Поручикова Е.А. [Научная статья]. – Режим доступа https://cyberleninka.ru/article/n/tehnicheskoe-zrenie-v-sistemah-upravleniya Дата доступа: 5.04.2023
9. Техническое зрение в системах управления мобильными объектами-2010 под ред. Р.Р. Назирова – Режим доступа http://www.iki.rssi.ru/books/2011tz.pdf Дата доступа: 10.04.2023
