Имитационная модель электропривода лебедки буровой установки Уралмаш 6500/450 БМЧ
Журнал: Научный журнал «Студенческий форум» выпуск №22(73)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №22(73)
Имитационная модель электропривода лебедки буровой установки Уралмаш 6500/450 БМЧ
Привод лебедки буровой установки Уралмаш 6500/450 БМЧ разработан по системе «Преобразователь частоты – асинхронный электродвигатель с короткозамкнутым ротором». Для управления приводом лебедки используются микропроцессорные системы, в которых реализована векторная система управления «Direct Torque Control (DTC)». Данный метод был предложен в середине 90-х годов фирмой ABB [2]. Основная идея системы DTC заключается в том, что на каждом шаге расчета определяется оптимальное состояние инвертора напряжения, которое вызывает изменение как момента, так и потокосцепления статора в необходимом направлении.
К электроприводу буровой лебедки предъявляется требование по уменьшению потерь электроэнергии. Для исследования электрических потерь в электроприводе лебедки произведено моделирование системы управления DTC в программной оболочке MatLab Simulink.
Параметры асинхронного электродвигателя фирмы ABB, используемого в качестве приводного, приведены в таблице 1.
Таблица 1.
Параметры асинхронного электродвигателя
|
Мощность, кВт |
950 |
|
Номинальное напряжение, В |
660 |
|
Номинальная частота вращения, об/мин |
987 |
|
Коэффициент полезного действия |
0.94 |
|
cosφ |
0.84 |
|
Момент инерции, |
25.3 |

На рисунке 1 приведена модель системы управления буровой лебедкой.
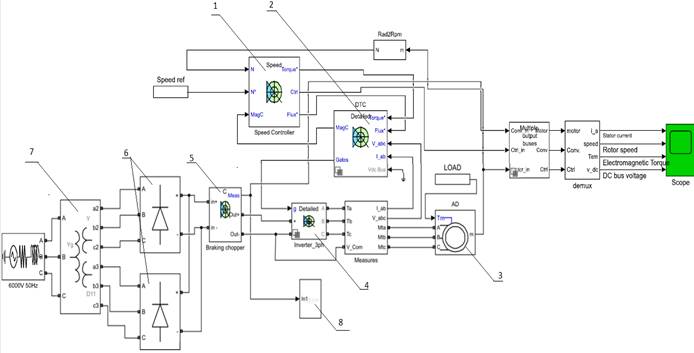
Рисунок 1. Модель системы управления электропривода буровой лебедки в среде программирования MatLab Simulink
Модель системы DTC состоит из: пропорционально-интегрального регулятора скорости, настроенного на симметричный оптимум (1); блока, реализующего логику управления DTC (2); модели асинхронного электродвигателя с короткозамкнутым ротором (3); трехфазного инвертора напряжения (4); звена постоянного тока с тормозным прерывателем (5); двух диодных трехфазных моста, реализующих 12-пульсную схему выпрямления напряжения (6); трехфазного трехобмоточного трансформатора напряжения, обеспечивающий сдвиг вторичного напряжения на 30 эл.градусов (7); 8- блока для измерения рассеиваемой электроэнергии на тормозном резисторе.
На рисунках 2 и 3 изображены графики работы электропривода лебедки буровой установки Уралмаш 6500/450 БМЧ, записанные при спуске колонны буровых труб массой 94 тонны на скважине №50 Димитровского месторождения. Запись производилась в программном обеспечении фирмы ABB «DriveWindow».

Рисунок 2. Графики электропривода лебедки при спуске колонны буровых труб. Переходной процесс при ускорении
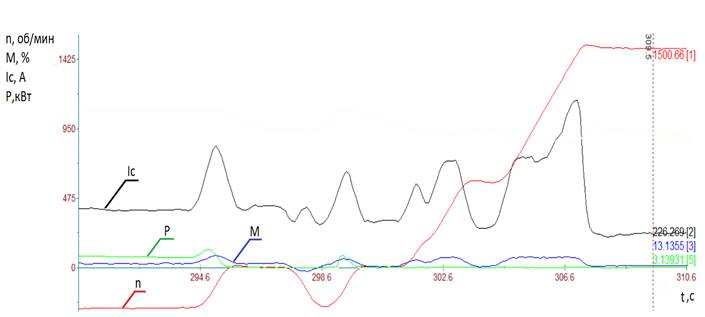
Рисунок 3. Графики электропривода лебедки при спуске колонны буровых труб. Переходной процесс при замедлении
На рисунке 2 и 3 приведены графики частоты вращения электродвигателя (n), момента на валу двигателя в процентах от номинального момента (M), ток электродвигателя, и мощность, рассеиваемая на тормозных сопротивлениях
В имитационной модели системы управления лебедкой произведем моделирование аналогичного процесса спуска колонны буровых труб и сравним результаты. На рисунках 4 и 5 приведены графики тока статора, скорости ротора, момента и мощности, рассеиваемой на тормозных резисторах имитационной модели.
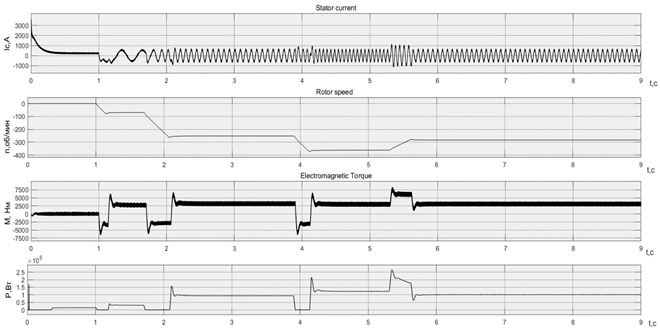
Рисунок 4. Графики имитационной модели электропривода лебедки при спуске колонны буровых труб. Переходной процесс при ускорении
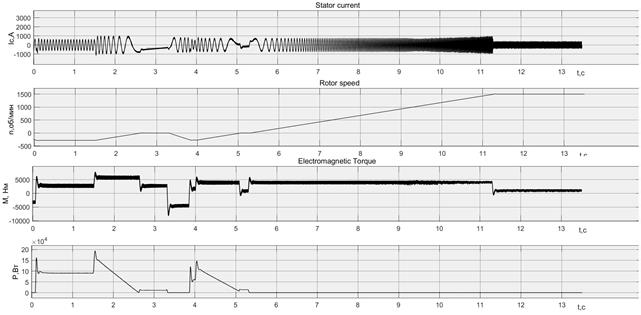
Рисунок 5. Графики имитационной модели электропривода лебедки при спуске колонны буровых труб. Переходной процесс при торможении
Проанализировав полученные графики, делаем вывод, что имитационная модель DTC, при одинаковом изменении скорости, в точности повторяет кривые момента и тока действующей установки. По графикам рассеиваемой мощности (рассматривая установившийся участок характеристики) видно, что при тормозных режимах (при спуске буровой колонны) значительная часть электроэнергии рассеивается на тормозных резисторах. Сравнивая установившиеся участки движения электропривода имитационной модели и действующей установки, получаем мгновенное значение рассеиваемой мощности в действующей установке 91 кВт, а в имитационной модели 100 кВт. Различия в 10 кВт объясняются погрешностями в расчетах имитационной модели.
Как было описано выше, одним из требований к электроприводу буровой лебедки является уменьшение электрических потерь. Рассеиваемая мощность, полученная при моделировании в виде графика, а также мощность, вырабатываемая действующей установкой, равняется 10% от номинальной мощности, потребляемой электродвигателем буровой лебедки. Исследования, проведенные в [1], показали, что при спуске колонны буровых труб на глубину 2000 м в сеть рекуперируется 160-200 кВт·ч электроэнергии. При спуско-подъемных операциях в процессе сооружения скважины на глубину до 2500 м производится подъем и спуск инструмента в среднем 6 раз с разной глубины [3]. Отсюда следует, что в среднем можно рекуперировать 1000 кВт·ч при сооружении одной скважины. Для возможности рекуперации электроэнергии в сеть, на буровой установке Уралмаш БУ6500/450 БМЧ, необходима реконструкция системы электроснабжения, а именно внедрение рекуператора электроэнергии. Данная операция позволит уменьшить электрические потери, что приведет к увеличению коэффициента полезного действия установки в целом.
