Разработка бионического протеза руки
Конференция: XXIX Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Биомеханика

XXIX Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»

Разработка бионического протеза руки
Аннотация. Данная работа описывает результаты исследований по разработке новых конструкторских и программно-технических решений в области создания многофункциональных роботизированных протезов верхних конечностей человека различной степени ампутации с использованием миоэлектрического интеллектуального управления захватом и движением суставов. Рассмотрены подходы к реализации сервоприводов в составе современных бионических протезов, проанализирована кинематика протезов, способы управления и взаимодействия пациента с протезом. Наш подход позволил внедрить сервопривод с циклоидальным редуктором в конструкцию пальца, что позволило достичь в 2 раза большую энерговооруженность (см. Таблица 1) по сравнению с представленными на рынке решениями и может быть использован при разработке как протезов рук и антропоморфных манипуляторов, так и отдельных функциональных узлов роботов. Универсальность разработанного дизайна протеза позволяет использовать отдельные пальцы при изготовлении протезов части кисти, что обеспечивается за счёт встроенного микро сервопривода. Так же были проведены исследования способов передачи обратной связи усилия сжатия предмета, что позволит упростить взаимодействие пользователя с протезом при выполнении быстрой последовательности операций над объектами. В результате установлено, что интуитивно понятным является реализация стерео воздействие на кожный покров пациента при помощи пары вибромоторов, управление фазой и амплитудой(интенсивность) пропорционально развиваемому усилию на контактных поверхностях пальцев протеза. Для раскрытия функционала многосхватного протеза в рамках продолжения работ проводится разработка системы распознавания паттернов мышечной активности с использованием разработанных активных цифровых электродов для регистрации миограммы.
Ключевые слова: бионическая кисть; протез верхней конечности; электромиография.
1. Введение
1.1 Описание проблемы
Миллионы людей в мире (~9.2 млн. человек) страдают от потери верхних конечностей, что приводит к потере трудоспособности, работы, и, как следствие, существенного снижения качества жизни.
Причины утраты верхних конечностей.
1) (~57%) Травматические и нетравматические ампутации
2) (~39%) Приобретённые заболевания (миодистрофия, контрактуры, паралич конечностей после инсульта)
3) (~4%) Врождённые заболевания (мышечная дистрофия Дюшенна, различные формы Амелии).
Эффективными решениями при протезировании верхних конечностей являются электромеханические роботизированные (бионические) протезы, копирующие кинематику и моторику кисти руки здорового человека, в которых каждый палец может двигаться отдельно, позволяя захватывать предметы различных форм.
К примеру, только в США [14] ежегодно проводится до 6000 ампутаций верхних конечностей, доля ампутаций верхних конечностей, что составляет прирост ~3.3% от общего числа.
Исследователями [3] было году показано, что на момент 2007 года отказ от использования традиционных протезов кисти составляет до 88%. В основном это связано с неудобством пользования, к примеру, для захвата стакана с водой пользователю приходится управлять ориентацией протеза за счёт мышц плечевого пояса, что крайне неудобно и внешне выглядит неуклюже. В то время на рынке ещё не были представлены многофункциональные бионические протезы, позволяющие выполнять множество различных схватов.
1.2 Актуальность проблемы
На данный момент подобные высокотехнологичные бионические протезы обладают крайне высокой стоимостью (от 25000$), что существенно ограничивает их применение в социальной сфере.
Протезы верхних конечностей разделяются на две основные группы:
1) Пассивные (косметические и функциональные)
2) Активные (тяговые и миоэлектрические)
Косметические протезы представляют собой высококачественный муляж здоровой руки, тем не менее, некоторые действия они позволяют выполнять, например, поддерживание и толкание предметов. Стоит отметить, что технологии производства косметических протезов могут быть использованы при изготовлении съёмных оболочек активных протезов.
К функциональным протезам относятся протезы с возможностью смены насадки, которые могут быть выполнены в виде различных инструментов – крюк, зажим, кольцо, гаечный ключ, молоток и др.
Тяговые протезы представляют собой простейшую версию активных протезов и приводятся в движение при помощи сгибания локтевого сустава, вследствие чего обладают ограниченным функционалом за счет всего лишь одного варианта сжатия пальцев.
Электромеханические роботизированные (бионические) протезы являются наиболее эффективными решениями для протезирования, т.к. способны более точно копировать кинематику кисти руки здорового человека за счёт использования нескольких независимых приводов для пальцев. Использование большего числа степеней свободы (как правило 5-6) по сравнению с тяговыми позволяет индивидуально управлять положением каждого пальца, за счёт чего обеспечивается выполнение сложных взаимных сочетаний движений и реализация разнообразных паттернов захвата. Разнообразие паттернов захватов позволяет пациенту эффективнее захватывать предметы.
1.3 Последние разработки
В последние двадцать лет был достигнут существенный прогресс в разработке разнообразных антропоморфных протезов руки с использованием новейших технологий. Несмотря на это, компромиссы между функциональностью, надежностью, доступностью и внешним видом еще не были до конца установлены. Множество существующих разработок [12, 13, 19, 21, 25, 27, 30], в особенности коммерческие протезы рук [1,2 11, 15, 20, 22-24], являются не полноприводными, т.е. имеют дефицит количества приводов по отношению к числу осей вращения и используют для передачи движения кинематические связи.
Разработки в области конструкции бионических протезов верхних конечностей подразделяются на два основных типа:
1) Многосхватные (как правило, все 5 пальцев двигаются свободно при помощи независимых приводов) [11, 12, 15, 24-26]
2) Односхватные (в движение приводятся при помощи одного общего привода) [1, 2,7, 20, 22, 28-29]
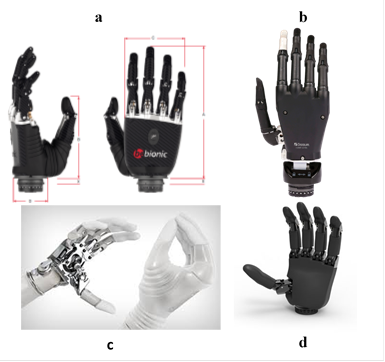
Рисунок 1. beBionic 3 (a), iLimb Ultra (b), Michelangelo (c), VincentEvolution 3 (d)

Рисунок 2. System Electric Greifer (a), Electrohand 2000 (b), AxonHook (c), VariPlus Speed (d), SensorHand Speed (e)
Взаимодействие пациента с протезом осуществляется посредством обработки поверхностной электромиограммы [4-6, 8-10,16-19,25] от остаточных групп мышц, при этом возможна классификация сложных сочетаний активации группы из нескольких мышц, что позволяет выделять дополнительные каналы управления (жесты), которые могут быть использованы для быстрого переключения между несколькими жестами протеза без необходимости использования специальных клавиш на корпусе протеза.
2. Описание исследований
2.1 Конструкция бионической кисти
В результате анализа конструкций бионических протезов и манипуляторов роботов их можно классифицировать следующим образом с точки зрения способа размещения сервоприводов пальцев:
1) Размещение привода вне конструкции пальца с передачей движения через эластичные тяги
Как правило, эластичные тяги применяются для передачи движения на большие расстояния при управлении большим числом степеней свободы. В таких случаях приводы размещаются вне конструкции ладони – обычно, внутри предплечья.
Использование подобного подхода при разработке протезов существенно ограничивает варианты исполнения и показания по назначению, и может быть реализовано только в протезах плеча и всей руки.
2) Размещение привода вне конструкции пальца с передачей движения через жесткие тяги [9-11]
Приводы размещаются внутри конструкции ладони и количество таких приводов ограничено габаритами, усилие сжатия протеза по такой компоновке максимальное за счёт более мощных моторов. Как правило, такие протезы выполняются больших размеров, свойственных руке взрослого мужчины
3) Размещения привода внутри конструкции пальца [7-8]
Наиболее универсальный подход к компоновке узлов протеза, позволяет использовать отдельные модули пальцев в составе персонально изготовляемых протезов кисти для пациентов с частичной или полной ампутацией пальцев руки.
Рассмотрим преимущества и недостатки обеих групп протезов (см. Таблица 1).
Таблица 1.
Преимущества и недостатки вариантов компоновки приводов внутри протеза
|
Размещение приводов |
Преимущества |
Недостатки |
|
Вне пальца (гибкие тяги) |
|
|
|
Вне пальца (жесткие тяги) |
|
|
|
Внутри пальца (жесткие тяги) |
|
|
В рамках проекта принято решение разработать собственный сервопривод и разместить его внутри проксимальной фаланги пальца.
Варианты исполнения конструкции пальца представлены на рис. 1.
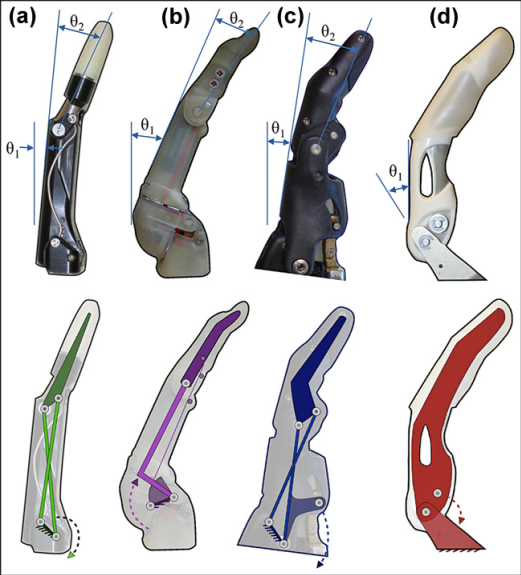
Рисунок 3. Варианты исполнения конструкции пальца протеза
В ходе исследования вариантов реализации редукторов сервоприводов пальцев было принято решение использовать циклоидальный микроредуктор внутри корпуса фаланги пальца и разместить цифровой 14-битный датчик Холла (угла) внутри пальца для точного контроля положения сустава. Такой подход является перспективным с точки зрения принципов построения универсального модуля пальца бионического протеза, который может быть использован как в протезе предплечья, так и в протезе кисти для пациентов с частичной ампутацией пальцев.
Особенностью кинематики пальцев бионических протезов является упрощение кинематической схемы до 2х поворотных шарниров, а не трех как у человеческой руки. Это обусловлено следующими факторами:
1) Сложность установки требуемого коэффициента передачи движения нескольким фалангам от одного привода
2) Увеличение коэффициента трения и, как следствие, снижение коэффициента полезного действия
3) При реализации привода внутри фаланги пальца (проксимальной) геометрические размеры пальца получаются заведомо выше, чем при использовании компоновки приводов вне конструкции пальца. Добавление ещё одной фаланги приводит к существенному увеличению габаритов пальца и самого протеза, превышающими размеры руки человека.
Таким образом, наиболее перспективным вариантом компоновки пальца является реализация двух фаланг.
Было принято решение освободившееся место внутри ладони благодаря размещению приводов внутри пальцев использовать для реализации дополнительных приводов – отведения большого пальца в сторону и вращения кисти вокруг оси (модуль ротатора). Неочевидное преимущество для пациента будет заключается в том, что независимо от степени ампутации каждому пациенту становится показано наличие модуля ротатора, в то время как в импортных протезах модуль ротации встраивается непосредственно внутри культеприемной гильзы и требует до 80мм свободного места. Важность наличия ротации кисти очевидна – это позволяет выполнять сложные движения при употреблении и приготовлении пищи.
Таблица 2.
Сравнение протезов по мощности
|
Параметр |
beBionic 3 (OttoBock) |
iLimb Revolution (OSSUR) |
Vincent Evolution (VincentSystems) |
Наше решение |
|
Время раскрытия ладони, сек |
1,0 |
1,2 |
1,5 |
0,5 |
|
Максимальное усилие сжатия, Н |
128 |
120 |
120 |
130 |
Как следует из Таблицы 2, разработанная конструкция протеза обеспечивает схожее усилие сжатия, при этом скорость сжатия в 2 раза выше.
Традиционно, в протезах верхних конечностей не используются датчики обратной связи по углу, т.к. их сложно интегрировать в конструкцию пальца и положение пальцев в таких протезах определяется посредством визуальной обратной связи пользователя, т.е. момент окончания движения паттерна пользователь выбирает сам «на глаз». В разрабатываемом модуле бионической кисти каждый палец представляет собой одностепенной манипулятор с встроенным 14-разрядным цифровым датчиком углового положения, что позволяет реализовать позиционно-силовое управление с контролем как развиваемого усилия, так и точного (до 0,05 градуса) следования за заданным положением.
2.2 Управление движением
Для формирования сложных движений протеза (паттернов) планируется к реализации наиболее репрезентативный набор паттернов, как правило, являющимся де-факто стандартным именно в данном составе и используется в роботизированных протезах верхних конечностей:
- Силовой захват всеми пятью пальцами. Происходит сжатие пальцев в кулак. Основной режим работы при выполнении большинства манипуляций, захвата объёмных предметов и переносе сумке.
- Захват щепотью – противопоставление большого пальца указательному и среднему. Участвую три пальца (большой, средний, указательный). Как правило, используется протяжённых предметов: ручка, столовые приборы
- Ключевой захват – указательный, средний, безымянный и мизинец подгибаются на половину диапазона. Отведённый в сторону большой палец осуществляет прижим объекта к боковой поверхности указательного пальца. Удержание ключей, столовых предметов
- Прецизионный захват – большой и указательный пальцы сходятся в точку. Захват мелких предметов.
- Указка – указательный палец находится в исходном положении при полном сжатии остальных пальцев. Используется при нажатии клавиш.
- Удержание манипулятора типа мышь – специальный паттерн для обхвата корпуса мышки и нажатия на левую клавишу.
- «Отлично». Большой палец поднят вверх при сжатом кулаке. Информативный жест для взаимодействия с окружающими
- «Иди ко мне». Периодическое сгибание/разгибание указательного пальца при сжатом кулаке
- «Хорошо». Большой и указательный пальцы сведены в одной плоскости образу кольцо. Средний, безымянный и мизинец отведены в сторону образуя волну
- Произвольный пользовательский паттерн – сохранение в базе данных протеза произвольных конфигураций движений пальцев для выполнения специфических задач, либо копирования предустановленного паттерна и более точной подстройки промежуточных значений
3. Результаты
Получены следующие результаты :
а) Разработаны принципы построения бионических протезов верхних конечностей для протезирования пациентов с частичными ампутациями кисти и предплечья
В ходе исследования вариантов реализации редукторов сервоприводов пальцев был реализован циклоидальный микроредуктор, компактные размеры которого позволили встроить его внутри корпуса фаланги пальца, а также разместить цифровой 14-битный датчик Холла (угла) внутри пальца. Такой подход является перспективным с точки зрения принципов построения универсального модуля пальца бионического протеза, который может быть использован как в протезе предплечья, так и в протезе кисти для пациентов с частичной ампутацией пальцев.
б) Разработан алгоритм управления бионическими протезами верхних конечностей
Система управления сервоприводами осуществляет:
а) Управление направлением вращения выходным валом
б) Плавность движения с равномерным ускорением в начале движения и торможением в конце движения.
в) Позиционирование шарниров протеза с точностью в 0,044 градуса
г) Угловую скорость движения поворотных звеньев до 100 градусов/сек.
в) Разработаны принципы формирования обратной связи пользователю бионического протеза
Исследованы подходы по воздействию на кожные покровы пользователя при помощи электрического тока и механического воздействия. С точки зрения безопасности и защиты от электрического удара наиболее эффективным и в то же время более информативным является воздействие при помощи двух вибромоторов, размещаемых диаметрально противоположно внутри культеприемной гильзы, оказывая аналог стереоэффекта. Интенсивность вибрации каждого и мотора и их комбинация пропорционально развиваемому усилию сжатия протеза позволяет не только ощущать силу сжатия, но и представляет собой удобный тактильный интерфейс оповещения пользователя о статусе работы протеза.
4. Заключение
Особенностью конструкции бионического протеза является использование вновь разрабатываемых микросервоприводов, размещаемых внутри конструкции пальцев и обеспечивающих суммарное усилие сжатия объекта на уровне 130Н при времени полного сжатия не превышающим 1 секунды, что соответствует характеристикам лучших образцов бионических протезов, представленных на международном рынке. Такая высокая энерговооружённость обеспечивается двумя факторами. Во-первых, использование специальных щеточных микроэлектродвигателей размером 12х15мм с ротором, выполненным в виде полого цилиндра, что обеспечивает высокий удельный момент. Во-вторых, использование вновь разрабатываемого редуктора, выходная ступень которого является циклоидальным редуктором. Реализация серводвигателей непосредственно внутри конструкции пальца предоставляет два ключевых преимущества над аналогичными изделиями:
1) Освободившееся место в конструкции ладони разрабатываемого протеза используется для размещения дополнительного сервопривода, так называемого ротатора. Устройство вращения кисти вокруг оси – пронация/супинация. На данный момент при изготовлении протезов используются электромеханические ротаторы. Однако, их использование показано не при всех диагнозах, т.к. требуется дополнительно до 70мм свободного пространства для установки модуля внутри культеприемной гильзы.
2) Возможность индивидуального протезирования отдельных пальцев и их произвольной конфигурации, путём изготовления специальной приемной гильзы, одеваемой поверх ладони пациента.
Особенностью управления разрабатываемым бионическим протезом является использование пропорциональных команд управления, формируемых в соответствии с уровнем напряжения остаточных мышц при помощи многоканальной системы регистрации биопотенциалов.
Разрабатываемые принципы построения конструктивно-компоновочных решений в области сервоприводов с высоким моментом на выходном валу, а также методы и алгоритмы управления движением приводов могут быть использованы при реализации продукции, находящейся на стыке нескольких технологических направлений:
1) Биоэлектрические протезы верхних конечностей для различных степеней ампутации кисти, предплечья, плеча и вычленения плеча
2) Биоэлектрические протезы нижних конечностей (роботизированные модули колена, стопы) для пациентов с различной степенью ампутации голени и бедра.
3) Манипуляторы сервисных и коллаборативных роботов для использования в домашнем хозяйстве и решения задач бизнеса
4) Экзоскелеты верхних и нижних конечностей для использования в реабилитационной медицине
Разрабатываемые методы многоканальной регистрации и обработки биопотенциалов мышечной активности могут быть использованы при разработке более широкого класса устройств:
1) Персональный переносной электрокардиограф для ранней диагностики и предсказания кризисных ситуаций сердечно-сосудистой системы пациента
2) Человеко-машинный интерфейс взаимодействия на основе обработки электроэнцефалограммы
При разработке системы регистрации биопотенциалов будет реализован набор активных поверхностных электродов, размещаемых непосредственно на поверхности кожи. При таком подходе снижается воздействие электромагнитных помех от внешних устройств, а также влияние потребителей питания, например, электродвигателей протеза, благодаря гальванической развязке цифровой линий связи между встраиваемым модулем управления протезом и модулем многоканальной обработки биопотенциалов. Возможно соединение в цепь произвольного числа электродов для захвата сигналов с распределённых групп мышц. Использование более 2х электродов позволяет выделять дополнительные каналы управления – распознавание отдельных жестов.
Благодарности
Исследование финансируется Министерством образования и науки РФ по соглашению о предоставлении субсидии #14.577.21.0290 от 28 ноября 2018 года. Тема проекта: “Разработка отечественной линейки роботизированных бионических протезов верхних конечностей, предусматривающей варианты исполнения с учетом различных степеней ампутации руки, с использованием миоэлектрического интеллектуального управления захватом и обеспечением уровня функциональности, близкого к здоровой руке человека” (уникальный идентификатор RFMEFI57718X0290).
