Статья:




Сравнительный анализ и исследование работы классического и нечеткого ПИД-регулятора
Секция: Технические науки
Выходные данные
Земцов А.Ф., Ноженков В.А., Лазебный А.Ю. Сравнительный анализ и исследование работы классического и нечеткого ПИД-регулятора // Технические и математические науки. Студенческий научный форум: электр. сб. ст. по мат. II междунар. студ. науч.-практ. конф. № 2(2). URL: https://nauchforum.ru/archive/SNF_tech/2(2).pdf (дата обращения: 16.11.2024)
Лауреаты определены. Конференция завершена
Эта статья набрала 2 голоса
Мне нравится2
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

II Студенческая международная научно-практическая конференция «Технические и математические науки. Студенческий научный форум»
Сравнительный анализ и исследование работы классического и нечеткого ПИД-регулятора
Земцов Алексей Фёдорович
магистрант Волгоградского государственного технического университета, РФ, г. Волгоград
Ноженков Вадим Артурович
магистрант Волгоградского государственного технического университета, РФ, г. Волгоград
Лазебный Алексей Юрьевич
магистрант Волгоградского государственного технического университета, РФ, г. Волгоград
Проведены разработка, исследование и анализ алгоритмов систем автоматического регулирования в среде программирования MatLab / Simulink. Выявлены достоинства и недостатки применения классического и нечеткого PID-регулирования для объектов различных классов путем анализа и сравнения их переходных характеристик.
Управление при помощи Пропорционально-Интегрально-Дифференциального регулятора (далее ПИД-регулятора) показывает хорошие результаты настройки систем автоматического управления. Однако в сложных моделях расчет параметров по формулам не дает оптимальной настройки регулятора, поскольку аналитически полученные результаты основываются на сильно упрощенных моделях объекта. [2] Поэтому, в настоящее время наблюдается интенсивное развитие применения нечеткой логики для целей управления [1].
В большинстве случаев технология нечеткого моделирования применяется для синтеза систем управления при недостаточной информации об объекте управления, неточном и неполном описании решаемой проблемы, поскольку не требует для синтеза регуляторов модели объектов управления опираясь на опыт операторов или потребителей [2]. К таким системам можно отнести системы управления с обратной связью содержащие в себе транспортное запаздывание. Переходные характеристики объектов управления (ОУ) в таких системах представлены на рисунке. Можно заметить, что при отношении  (рис. 1 а) переходная характеристика совпадает с характеристикой апериодического звена, а при увеличении отношения ОУ начинает вести себя как колебательное звено (или апериодическое звено второго порядка).
(рис. 1 а) переходная характеристика совпадает с характеристикой апериодического звена, а при увеличении отношения ОУ начинает вести себя как колебательное звено (или апериодическое звено второго порядка).
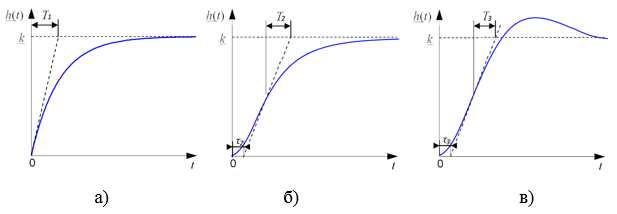
Рисунок 1. Влияние отношения транспортного запаздывания  к постоянной времени T на переходную характеристику апериодического звена. Где
к постоянной времени T на переходную характеристику апериодического звена. Где 
Для получения моделей ОУ с данными характеристиками в среде MatLab / Simulink было произведено последовательное соединение апериодических звеньев с дальнейшей группировкой в блоки (команда subsystems) для удобства дальнейшего использования и читаемости.
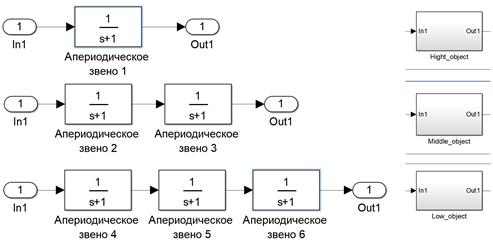
Рисунок 2. Построение звеньев с необходимыми переходными характеристиками.
Для исследования и анализа эффективности классического и нечеткого алгоритма регулирования была разработана модель системы автоматического управления, представленная на рисунках 3 и 4. Здесь для каждого объекта управления имеется свой регулятор, осциллограф и обратная связь. Из общего задающего воздействия и обратной связи каждого объекта вычисляются сигналы ошибки, которые приходят на вход в регулятор. Осциллографы на выходе из объектов снимают показания для дальнейшего анализа, а на контуре обратной связи к сигналу прибавляется случайный сигнал (от -5 до 5), символизирующие нагрузку (потребителя) и помехи.
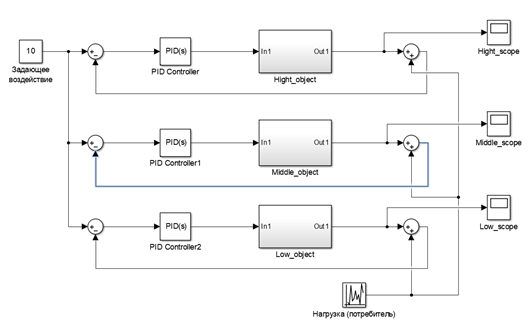
Рисунок 3. Структурная схема САР тремя объектами с классическим PID-регулятором
Как видно из графиков (рис. 5 и 6), PID-регулятор прекрасно стравился с задачей для объектов, соответствующих характеристикам, а и б (рисунок 1). Для объекта в (с большим отношением  ) переходной процесс приводит к гармонически затухающим колебаниям.
) переходной процесс приводит к гармонически затухающим колебаниям.

Рисунок 4. Структурная схема САР тремя объектами с нечетким PID-регулятором

Рисунок 5 – Результаты моделирования переходной характеристики для объектов различных классов с PID-регулятором

Рисунок 6. Результаты моделирования переходной характеристики для объектов различных классов с нечетким регулятором
С использованием нечеткого регулятора переходная характеристика получается более сглаженная для любого класса описанных выше объектов. Однако, стоит отметить, что также увеличивается время перехода для объектов (а) и (б), по сравнению с «классическим» PID- регулятором.
Список литературы:
1. Исследование классических и нечетких ПИД-регуляторов для нестационарных объектов управления / В.И. Копылов, Д.И. Муравьев, В.Г. Коломыщев, Г.И. Рустамханова // Издательский Дом "Академия Естествознания". Сер. Фундаментальные исследования. – г. Пенза, 2016. - № 11-3. - C. 532-536.
2. Евгенов А.А., Нейросетевой регулятор системы управления квадрокоптером [Электронный ресурс] // Современные проблемы науки и образования. – 2013. – № 5. – Режим доступа : https://www.science-education.ru/ru/article/ view?id=10222/
