ОСОБЕННОСТИ ПОСТРОЕНИЯ КОРРЕЛЯЦИОННО-ЭКСТРЕМАЛЬНЫХ СИСТЕМ НАВИГАЦИИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Журнал: Научный журнал «Студенческий форум» выпуск №1(224)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №1(224)
ОСОБЕННОСТИ ПОСТРОЕНИЯ КОРРЕЛЯЦИОННО-ЭКСТРЕМАЛЬНЫХ СИСТЕМ НАВИГАЦИИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
При создании помехозащищенных автономных навигационных систем широкое распространение получил метод навигации по физическим полям Земли, основанный на сопоставлении значений некоторых параметров поля, измеренных в процессе движения объекта и рассчитанных по данным подготовленной карты поля [3]. Для практической реализации данного метода навигации необходимо наличие априорной картографической информации с известным уровнем погрешностей и учета изменения координат объекта.
Метод навигации по физическим полям Земли использует при обработке измерений параметров поля корреляционно-экстремальные методы для определения координат объекта в соответствии с положением точки максимума взаимной корреляционной функции измеренных значений параметра поля и рассчитанных с использованием карты. Системы получили название корреляционно-экстремальных навигационных систем (КЭНС) [3].
В состав данных систем входят следующие основные составляющие [1]:
- измеритель используемых параметров поля;
- картографическая база данных;
- вычислитель, реализующий алгоритм решения задачи выработки поправок к бортовой непрерывно работающей навигационной системе [3].
По объему используемой измерительной информации системы разделяются на классы:
- система 1-го класса (измерительная информация в текущий момент времени снимается в точке, выходной сигнал датчика поля представляет собой скалярную величину);
- система 2-го класса (за цикл сканирования формируется информация о поле вдоль произвольных, но заранее выбранных линий, выходной сигнал датчика поля представляет собой вектор);
- система 3-го класса (рабочая информация в каждый момент времени снимается с участка площади, выходной сигнал датчика поля представляет собой кадр).
Примеры данных классов представлены на рисунке 1.
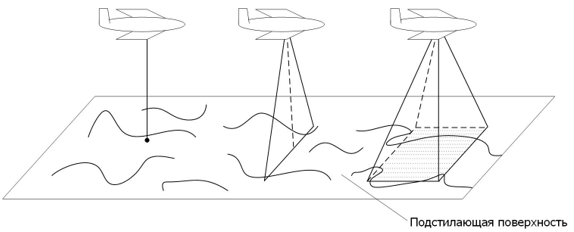
Рисунок 1. Примеры данных классов
Физические поля Земли, используемые в навигации [1]:
- пространственные поля Земли, параметры которых определены в каждой точке околоземного пространства (магнитное и гравитационное поля);
- поверхностные поля Земли, параметры которых для различных объектов определены лишь на земной поверхности.
Наиболее информативными полями являются поверхностные поля, в частности поле оптического контраста, ввиду информационной содержательности любого малоразмерного объекта земной поверхности в сочетании с высокой разрешающей способностью оптических приборов. Для решения задач навигации может быть использована информация следующих полей [2]:
- поле рельефа земной поверхности (измерение параметров поля осуществляется с помощью радиовысотомеров или дальномеров, используется также информация от барометрических или инерциальных измерителей высоты);
- оптическое поле земной поверхности, которое образуется отдельными объектами и их взаимным расположением в видимом диапазоне излучений и характеризуется геометрическими, яркостными и спектральными признаками изображения (бортовые измерения параметров этого поля осуществляются оптическими или телевизионными средствами получения изображений);
- тепловое поле земной поверхности, образуемое электромагнитным излучением отдельных ее элементов в инфракрасном, сантиметровом или миллиметровом диапазонах волн и характеризующееся кажущейся температурой этих объектов (эта температура измеряется с достаточно больших расстояний радиометрами, работающими в соответствующих диапазонах длин волн);
- поле радиолокационного контраста, характеризующее отражательные свойства местности в радиодиапазоне длин волн (количественные показатели коэффициента отражения радиоволн измеряются бортовыми радиолокаторами со сканирующим лучом или с синтезированной апертурой);
- магнитное поле Земли, характеризующееся напряженностью и направлением магнитных силовых линий (бортовые измерения этих полей выполняются индукционными, феррозондовыми, квантовыми магнитометрами);
- гравитационное поле Земли, характеризующееся силой притяжения (бортовые датчики этого поля (гравиметры) строятся на основе измерения силы притяжения эталонных масс, расположенных на борту подвижного объекта, к земной поверхности в данном месте).
К основными достоинствами КЭНС относятся [2]:
- автономность системы;
- скрытность функционирования;
- высокая точность измерения;
- линейность характеристик измерения;
- высокая чувствительность современных оптических систем;
- отсутствие накапливающихся погрешностей;
- широкая возможность использования неавтоматизированных (визуальная ориентировка) и автоматизированных средств измерения.
Однако, несмотря на перечисленные преимущества, применение КЭНС в качестве единственной системы навигации невозможно по следующим причинам:
- подверженность искусственным и естественным помехам;
- ограниченное быстродействие (высокие требования к вычислительным устройствам);
- сложность наведения на подвижный объект;
- необходимость подготовки априорной актуальной эталонной информации;
- высокая стоимость;
- относительно длительный срок подготовки к боевому применению;
- неэффективность в условиях отсутствия ориентиров (моря, пустыни и т.п.);
- необходимость преобразования текущего изображения с датчиков информации в форму, удобную для сравнения с эталоном;
- необходимость наличия большого объема памяти для хранения эталонного изображения и большой объем вычислений.
