Общий алгоритм функционирования имитационной модели тренажерного комплекса с динамической платформой
Конференция: XIII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Информатика, вычислительная техника и управление

XIII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»

Общий алгоритм функционирования имитационной модели тренажерного комплекса с динамической платформой
General algorithm for the functioning of the imitation model of a simulator complex with a dynamic platform
Sergey Chernykh
Candidate of Technical Sciences, Deputy Head of the Software Development Department for Mathematical Modeling, CJSC "Institute of Telecommunications", Russia, St. Petersburg
Аннотация. В статье представлен общий алгоритм функционирования имитационной модели тренажерного комплекса, который позволит имитировать работу всех систем «физической машины», увеличить вычислительную производительность и обеспечит разработку специального программного обеспечения для современных тренажерных средств.
Abstract. The article presents a general algorithm for the functioning of the imitations model of the simulator complex, which will simulate the operation of all systems of a "physical machine", increase computational productivity, and provide the development of special software for modern simulators.
Ключевые слова: тренажёр; математическая модель; имитационная модель; программное обеспечение тренажёра; тренажёрный комплекс, алгоритм.
Keywords: training apparatus; mathematical model; imitation model; simulator software; simulator complex, algorithm.
Введение. Для разработки тренажёрных комплексов (ТК) с динамической платформой, требуется имитационная модель (ИМ), которая позволяет в режиме реального времени имитировать работу всех систем «физической модели», а также выполнять задачи установленными Курсом вождения машин (КВМ). Актуальность работы представлена в разработке алгоритма функционирования ИМ, который позволит имитировать работу всех систем «физической модели» в виде непрерывной функции. Новизна работы заключается в преобразовании математических зависимостей – дифференциальных уравнений n-го порядка к линейным зависимостям для ускорения вычислительных процессов. Теоретическая значимость данной работы заключается в разработке общего алгоритма функционирования ИМ для ТК, при работе которого результаты близки к непрерывной функции. Практическая значимость работы представляется в применении данного алгоритма при разработке программного обеспечения для современных ТК с подвижной динамической платформой.
Общий алгоритм функционирования ИМ. Имитация работы «физической машины» происходит непрерывно по времени. Она представлена в виде непрерывной функции F(t) (рисунок 1). Для описания работы тренажёра решаются дифференциальные уравнения ![]() .
.

Рисунок 1. График непрерывной функции
Данная модель удобна для систем, позволяющих моделировать функцию непрерывно, используя аналоговые ЭВМ или подобные ей системы. ИМ ТК должна функционировать на аппаратно-вычислительном комплексе, состоящем только из цифровых ЭВМ. Соответственно, моделирование будет иметь следующий вид (рисунок 2). Нахождение значений функции происходит через определённый интервал времени dt. Чем меньше значение dt, тем точнее значения функции, но при этом нельзя допустить значения, равного нулю.
Работа ТК - это непрерывный цикл, в котором исполняется логический сценарий работы имитируемых систем и визуализируется картинка на экране (визуализация обстановки), обычно с частотой не менее 30-60 кадров в секунду.
Компоненты работы ТК представлены на рисунке 3.
Инициализация – стадия, на которой выполняются стандартные операции, характерные для любой программы, такие как выделение памяти, получение ресурсов, загрузка данных с БД и т.п.
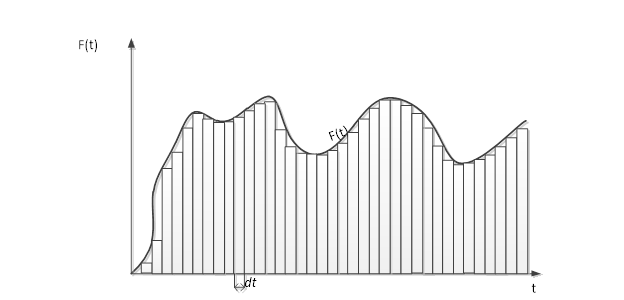
Рисунок 2. График дискретной функции
Вход в цикл розыгрыша сценария - стадия выполнения кода, на которой начинается розыгрыш имитации сценария (условия, заданные инструктором для выполнения упражнения). Здесь начинается моделирование, и оно продолжается до тех пор, пока инструктор не остановит процесс имитации и не выйдет из основного цикла.
Выполнение модели ИМ – эта стадия содержит основную стадию моделирования. Выполняются математические и имитационные модели. Результаты моделирований используются для формирования следующего кадра визуализации во внеэкранной буферной зоне. Его визуализацию невозможно увидеть. Затем происходит быстрое копирование изображения на экран, в результате чего возникает анимационный эффект.

Рисунок 3. Порядок работы ТК с динамической платформой
Виртуализация следующего кадра – это стадия, где данные, полученные от действия обучаемого, и результаты моделирования используются для формирования следующего кадра для визуализации и передачи данных на каналы визуализации, динамическую платформу.
Передача данных на динамическую платформу – стадия, когда данные, сформированные на этапе визуализации кадра, обрабатываются на динамической платформе, перемещая кабину.
Синхронизация каналов визуализации – этап визуализации. Так как на ТК требуется визуализировать не только окна водителя, но и зеркала заднего вида, и внешнего вида «физической машины» на месте инструктора.
Начало нового цикла моделирования – всего лишь возврат к началу цикла розыгрыша ИМ и повторение его заново.
Завершение работы - это конец моделирования, сохранение результатов в базу данных, для последующей обработки и анализа.
Таким образом, для формирования кадра с целью визуализации требуется выделение интервала времени dt (рисунок 2), который позволит произвести обработку данных, полученных в ходе моделирования ИМ. Для этого разработана структура работы ИМ и организация взаимодействия его элементов, которая обеспечит процесс моделирования в рамках dt. Общий алгоритм функционирования ИМ представлен на рисунок 4.

Рисунок 4. Общий алгоритм функционирования ИМ
Порядок моделирования проходит за определённый интервал времени dt (шаг моделирования). В первом блоке - модель формирования исходных параметров ИМ (МФИП), предназначенная для формирования исходных данных параметров моделирования, инициализации моделируемой среды, окружающей обстановки, объектов, выбранных отказов блоком управления АРМ инструктора. Исходные данные моделирования приходят от блока управления АРМ инструктора. В блоке проверки (АВ=1) устанавливается запуск работы ИМ или его прекращение. На любом шаге инструктор, изменяя параметр АВ, включает процесс моделирования или прекращает его. Требуется это для аварийной остановки и изменения условия моделирования.
Далее все элементы ИМ выполняют установленные им процессы моделирования (рисунок 4), а именно:
модель имитации динамической платформы (МИДП) предназначена для организации взаимодействия ИМ и кабиной тренажёра. Модель позволяет передавать, получать управляющие команды и сообщения от кабины тренажёра;
модель имитации органов управления (МИОУ) предназначена для обработки событий от органов управления кабины. Модель позволяет сохранять обработанные данные в МХТП с целью дальнейшей обработки соответствующих элементов ИМ;
модель движения (МД) предназначена для моделирования движения машины, агрегатов, навесного оборудования. Модель решает вопросы имитации работы двигателя, электрооборудования, системы охлаждения, гидросистемы, работы агрегатов в различных условиях среды и действий обучаемых (механика-водителя, командира (оператора)), а также расчётов продольно-угловых колебаний в пространстве;
модель имитации отказов (МИО) предназначена для моделирования отказов элементов машины, полученных в ходе управления механиком-водителем, командиром (оператором) и установленных заранее через блок управления АРМ инструктором. Данная модель обнаруживает условия появления отказа и моделирует его;
модель имитации приборов (МИП) предназначена для подготовки данных, которые позволят имитировать приборы на ДП;
модель визуализации (МВ) предназначена для моделирования визуальной имитации района, статических и динамических объектов, имитируемой машины в различных условиях;
модель имитации акустической обстановки (МИАО) предназначена для моделирования шумовых характеристик двигателя, агрегатов машины, шумов при движении;
модель формирования результатов (МФР) предназначена для формирования результатов моделирования, а именно фиксации отказов, ошибок, параметров моделирования.
После выполнения элементами ИМ процессов моделирования результаты передаются на АРМ инструктора.
Пример работы ИМ при выполнении одного цикла представлен на рисунке 5. В данном примере рассматривается событие включения кнопки «Пуска двигателя» (включение стартера) при движении машины.
При получении состояния от кабины МИДП распаковывает данные, записывая их в МХТП в пакет параметров МИОУ. В рамке примера, кнопка пуска двигателя (КПД) КПД = 1 (кнопка включена) и ПУТН (педаль управления топливным насосом) = 5 (уровень нажатия педали).
Далее начинает работать МИОУ. Исходными данными для работы модели являются: КПД; ![]() - номинальная мощность стартера (11 кВт). Модель вычисляет ток нагрузки сети Iн (А) и записывает его в пакет параметров МД (электрооборудования). Нажатие педали ПУТН в модели МИОУ не обрабатывается, так как дополнительных расчётов не требуется.
- номинальная мощность стартера (11 кВт). Модель вычисляет ток нагрузки сети Iн (А) и записывает его в пакет параметров МД (электрооборудования). Нажатие педали ПУТН в модели МИОУ не обрабатывается, так как дополнительных расчётов не требуется.
За МИОУ начинает работу МД со своими элементами: электрооборудованием, топливной системой, моделью двигателя, моделью реализации продольно-угловых колебаний и перемещения в пространстве.
Входными параметрами для работы электрооборудования являются: КПД; РР – реле регулятор (1 – электрическое питание поступает от генератора через РР, 0 - электрическое питание поступает от АКБ, так как генератор не работает); ![]() - бортовое напряжение сети (24 В);
- бортовое напряжение сети (24 В);![]()
![]() – пороговое напряжение, при котором могут нормально работать электроприборы (> 20 В);
– пороговое напряжение, при котором могут нормально работать электроприборы (> 20 В);![]() Eакб –номинальная ёмкость АКБ (280 А*ч). Результатом моделирования являются:
Eакб –номинальная ёмкость АКБ (280 А*ч). Результатом моделирования являются:![]() – обороты стартера (1000 об. мин); E – реальная ёмкость АКБ (при увеличении нагрузки стартера мощности генератора будет не хватать – начнётся разрядка АКБ, до моделирования 426 А*ч, после 398 А*ч). Результаты записываются в пакет параметров электрооборудования МД в МХТП.
– обороты стартера (1000 об. мин); E – реальная ёмкость АКБ (при увеличении нагрузки стартера мощности генератора будет не хватать – начнётся разрядка АКБ, до моделирования 426 А*ч, после 398 А*ч). Результаты записываются в пакет параметров электрооборудования МД в МХТП.

Рисунок 5. Схема работы ИМ при выполнении одного шага цикла
Входными параметрами для работы топливной системы являются: ПУТН; ТБП – наличие топлива в переднем топливном баке; ![]() – параметр, характеризующий работу форсунок на двигателе (0 – не работают, 1 - работают);
– параметр, характеризующий работу форсунок на двигателе (0 – не работают, 1 - работают); ![]() – параметр, характеризующий расход топлива за 1 км движения машины. После моделирования модели электрооборудования результат записывается в пакет параметров топливной системы МД в МХТП, а именно
– параметр, характеризующий расход топлива за 1 км движения машины. После моделирования модели электрооборудования результат записывается в пакет параметров топливной системы МД в МХТП, а именно ![]() – рассчитанные обороты двигателя (до моделирования – 1300 об. в мин., после моделирования – 1250 об. в мин.) и ТБП – рассчитанный расход топлива (до моделирования – 700 л., после моделирования – 769 л.).
– рассчитанные обороты двигателя (до моделирования – 1300 об. в мин., после моделирования – 1250 об. в мин.) и ТБП – рассчитанный расход топлива (до моделирования – 700 л., после моделирования – 769 л.).
Далее работает модель двигателя. Входными параметрами для моделирования являются ![]() (1250 об. в мин.). Результатом моделирования будет V – скорость перемещения машины (40 км. в ч.), которая заносится в пакет параметров двигателя МД в МХТП.
(1250 об. в мин.). Результатом моделирования будет V – скорость перемещения машины (40 км. в ч.), которая заносится в пакет параметров двигателя МД в МХТП.
Входными параметрами для модели реализации продольно-угловых колебаний и перемещения в пространстве являются V, X (1210), Y (2512) – координаты нахождения машины до моделирования. В ходе моделирования определяется новое положение машины в пространстве с новыми координатами X (1200), Y (2500) , которые записываются в пакет параметров реализации продольно-угловых колебаний и перемещения в пространстве МД в МХТП.
Для работы МИО требуются следующие входные параметры: КПД, ![]() . Модель обнаруживает запрещающее состояние – нажатие кнопки запуска двигателя в движении и фиксирует в пакете параметров МИП в МХТП код отказа.
. Модель обнаруживает запрещающее состояние – нажатие кнопки запуска двигателя в движении и фиксирует в пакете параметров МИП в МХТП код отказа.
В МИП формируют показания приборов тахометра и вольтметра. Исходными данными для моделирования являются: Iн, ![]() . Результаты для приборов формируются для последующей передачи в кабину и сохраняются в пакете параметров МИП в МХТП (тахометр, вольтметр).
. Результаты для приборов формируются для последующей передачи в кабину и сохраняются в пакете параметров МИП в МХТП (тахометр, вольтметр).
МВ загружает из пакета параметров элементы сценария (полигон, объекты, условия атмосферы и т.д.), из пакета параметров реализации продольно-угловых колебаний и перемещения в пространстве новые координаты местоположения X, Y. Модель формирует новый кадр визуализации камер (камера наблюдения обучаемого, камера наблюдения инструктора). Сохранение производится в виде z-буферизации (пример) изображения в пакет МВ с последующим выводом кадра на мониторы.
МИАО по анализу входных параметров КПД ![]() определяет тональность работы двигателя по изменениям оборотов двигателя, а также выбору звукового сопровождения стартера, сохраняя в пакет параметров МИАО в МХТП (А1, А2), и модель воспроизводит имитацию звуковых эффектов.
определяет тональность работы двигателя по изменениям оборотов двигателя, а также выбору звукового сопровождения стартера, сохраняя в пакет параметров МИАО в МХТП (А1, А2), и модель воспроизводит имитацию звуковых эффектов.
Далее начинает работу МФР. Входными параметрами модели являются: код отказа, X, Y, Xс, Yс – координаты маршрута движения по сценарию. Модель анализирует отказы, формируя ошибки, а также сравнивает положение машины с требуемым положением по сценарию с целью выявления ошибки. В случае обнаружения ошибок модель записывает в пакет параметров МФР в МХТП код ошибки.
Далее через МИДП в ДП передаются параметры, полученные в ходе моделирования, и считываются новые сообщения от кабины. Таким образом, цикл моделирования и формирования визуализации закончен.
Из примера видно, что элементы ИМ и их подсистемы имеют общую структуру (рисунок 6).
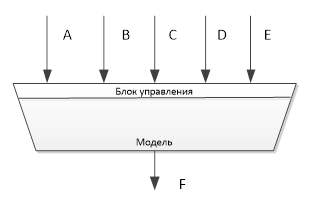
Рисунок 6. Общий вид элементов и подсистем ИМ
A, B, C, D, E – являются входными параметрами модели. В модели имеется блок управления, который анализирует входные параметры для выбора решения. Входные параметры определяются из состояния среды моделирования МХТП (рисунок 5). Результат F записывается в МХТП, изменяя её состояние в интервале времени dt.
Из приведённого примера (рисунок 5) видно, что главную роль в ИМ играет МХТП, которая хранит состояния имитации всех элементов ИМ. Каждый элемент ИМ уникален и выполняет различные расчёты и действия.
Для организации работы и управления моделями процессов требуется алгоритм функционирования элемента ИМ.
Общая структура алгоритма работы элемента ИМ представлена на рисунок 7.

Рисунок 7. Общая структура работы элемента моделирования
Каждый элемент ИМ считывает входные параметры для моделирования из МХТП. Блок управления элемента ИМ производит анализ входных параметров и определяет вариант работы (расчётов, действий):

Затем выполняет выбранный процесс. По заключению выполнения процесса результаты моделирования (выходные данные модели) сохраняются МХТП.
Таким образом, в рассмотренном общем алгоритме работы ИМ ТК, главную роль выполняют алгоритмы подсистем, которые определяют порядок вычислений, исходя из условий моделирования, и передают полученные результаты в модуль МХТП. Это позволяет динамически изменять состояние «физической модели» с изменениями параметров модуля МХТП.
Заключение
Как видно из проведенных исследований и практического применения общего алгоритма ИМ ТК, при разработке опытно-конструкторских разработок, были достигнуты положительные результаты функционирования ТК, что позволило имитировать более адекватно «физическую модель машины».
